



(I’ve just realized how clunky the formatting turned out for this page on some computers. It’s what I get for using a free site, I guess. The only solution I can offer is to play with the window width. For most of the article the pairs of images should sit side-by-side.)
I’ve always been drawn to the bulky gauntlet aesthetic in various fictional characters. Bakugo, Megaman, War Machine, etc. Until recently, I’ve had to stick my forearm into a cardboard shipping tube and play make-believe, but now knowing much more about design and fabrication, I decided to build something better.
I named it the Superior Assault Gauntlet Apparatus, or S.A.G.A. for short. I tried to make it sound really gung-ho, like the military’s Avenger and SCAR nomenclature, but also stand as an acronym for something, like GUNDAM (Generation Unrestricted Network Drive Assault Module)
This is the synthesis of my all my engineering skill and experience so far, and I’m really proud of how it came out. This project involves gear drives, LED lighting, programming, electronic circuitry, a TON of 3D visualization and modelling, and around 200 hours of work.
Enjoy the build!
Overview
I’ve organized this writeup into the subsystems of the build, and tried to arrange them somewhat in chronological order:
- Chassis, Part 1 – preliminary frame construction
- Mode: SHOOT – autocannon development
- Chassis, Part 2 – frame/body construction
- Mode: SLASH – actuating blade development
- Control Systems – electronic systems management
- Assembly – Oh yeah, it’s all coming together
- Extras – prototype display, sketch gallery
Chassis, Part 1


(1) I started by making a cardboard template to get rough dimensions of my arm. One of the main challenges of this build was that I was essentially building on the inside of a closed tube, which is very difficult compared to mounting things onto a flat chassis or other open frame.
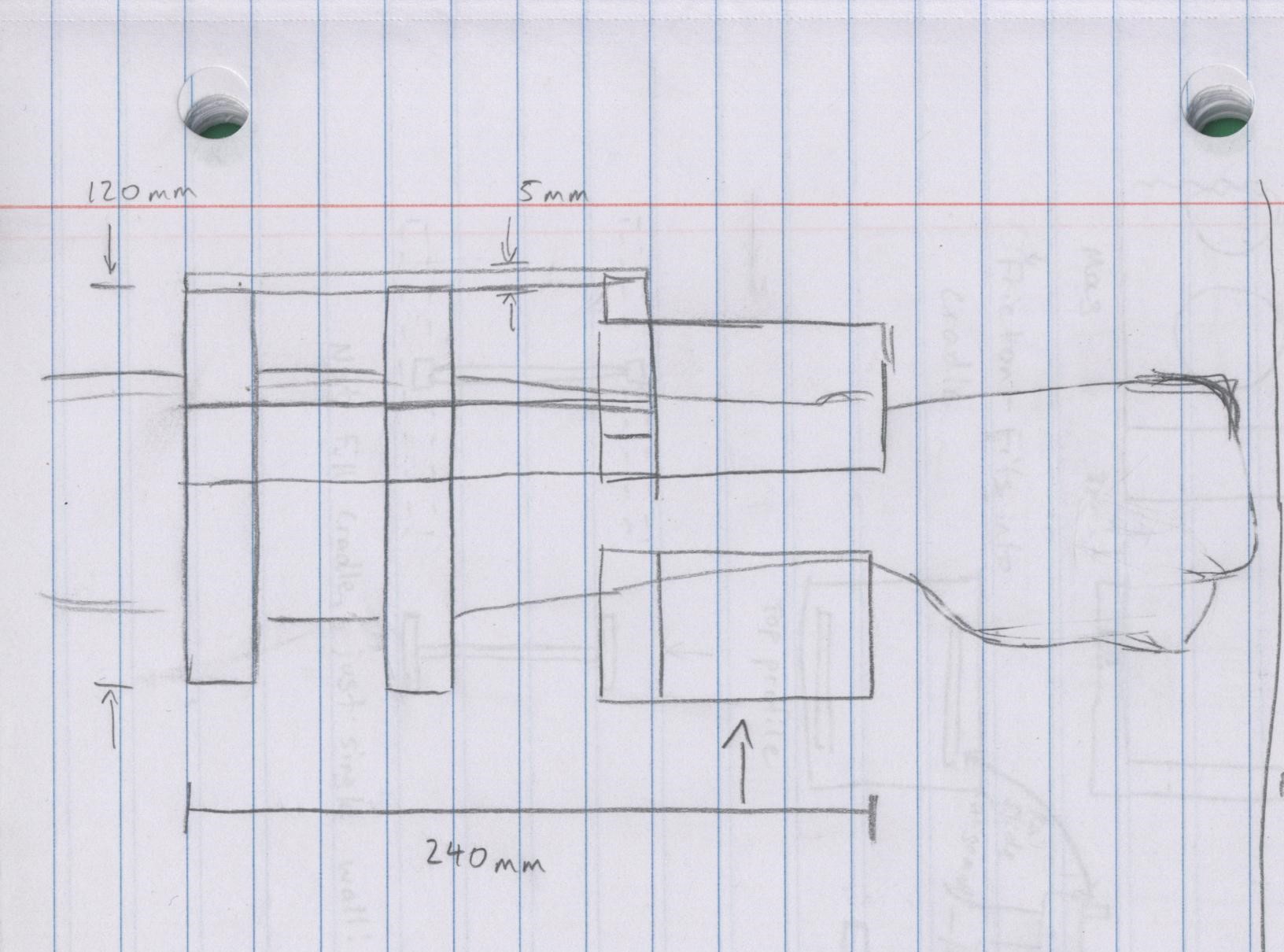
(2) The template ended up fitting well with a 93mm diameter hole, positioned 240mm from my wrist. I added an octagonal border to the outside of the circle to give myself flat outside surfaces to mount attachments onto.
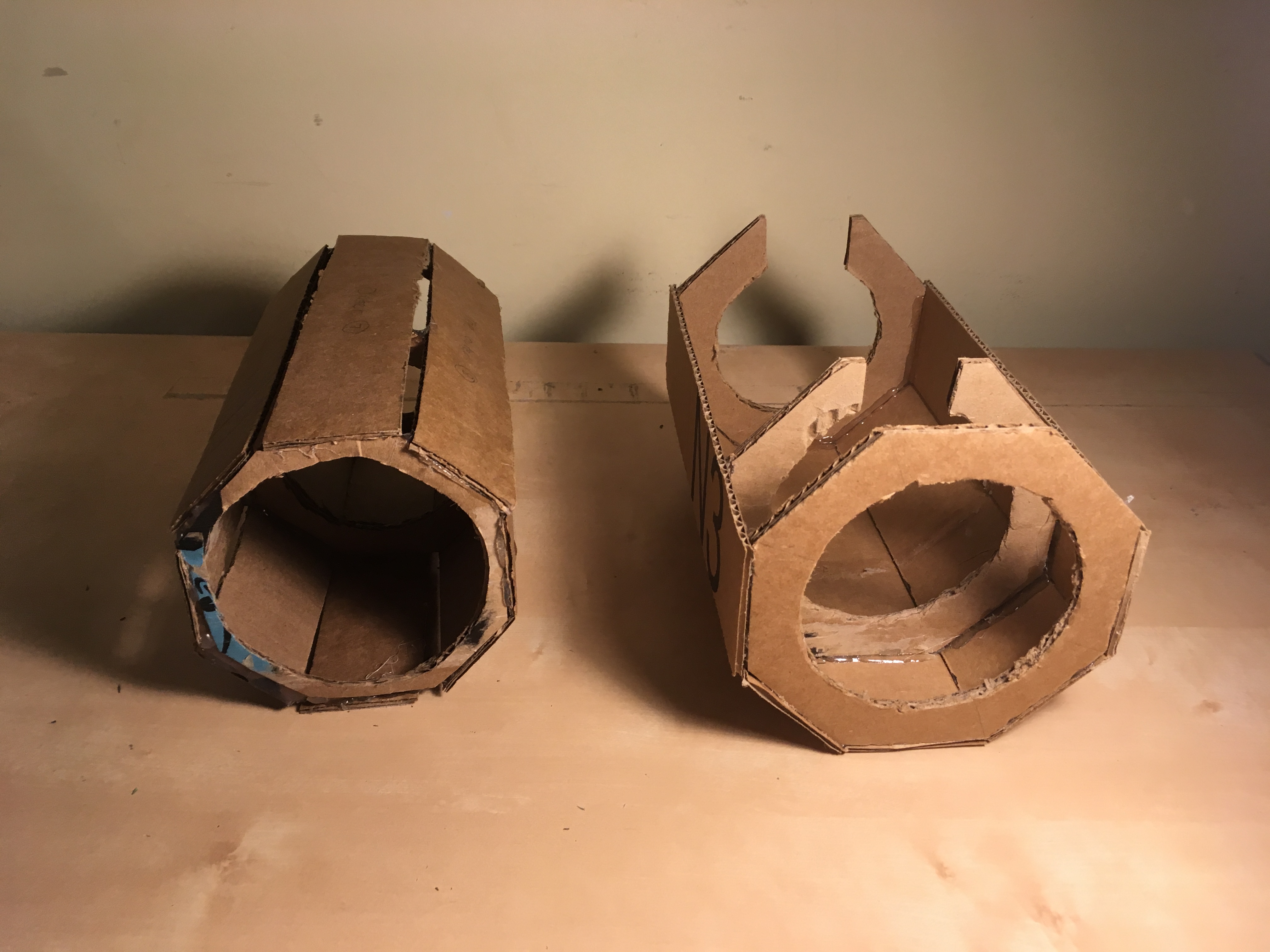

(3) My first and second cardboard models. I realized the first one would be too small to house wires and parts inside, so I created a bigger one (right). The slot on the bigger model was to fit the autocannon magazine.
(4) Test fit on my forearm

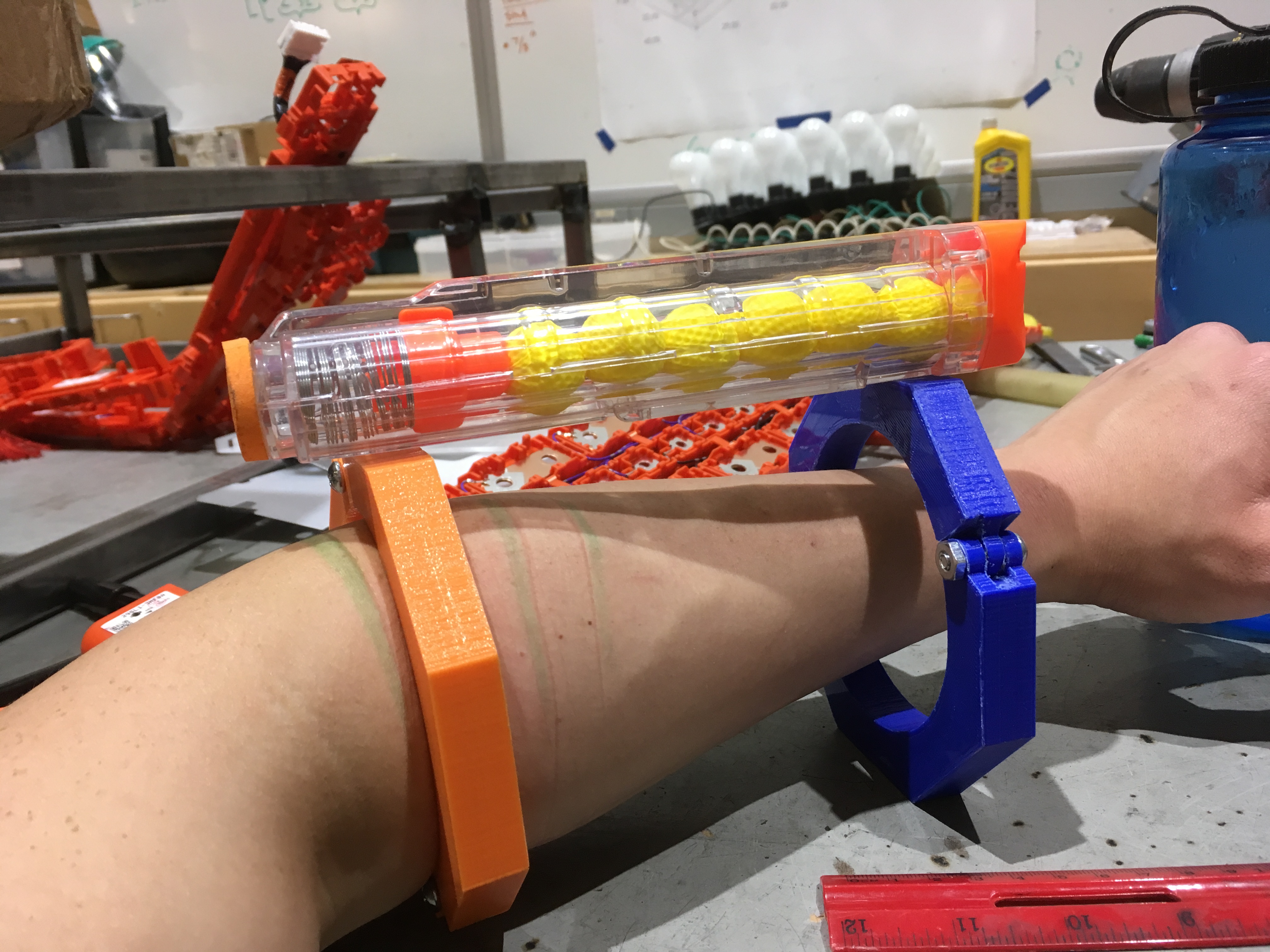
(5) I built the octagons in Solidworks, then tried a physical mockup to test the fit. I initially planned on having the arm hole be 93 mm along the entire length of the gauntlet, so the only way to secure it would be too have it clamped very tightly around my flexors and extensors. As you can imagine, this was very uncomfortable.
(6) Quick mockup with magazine included for visualization.
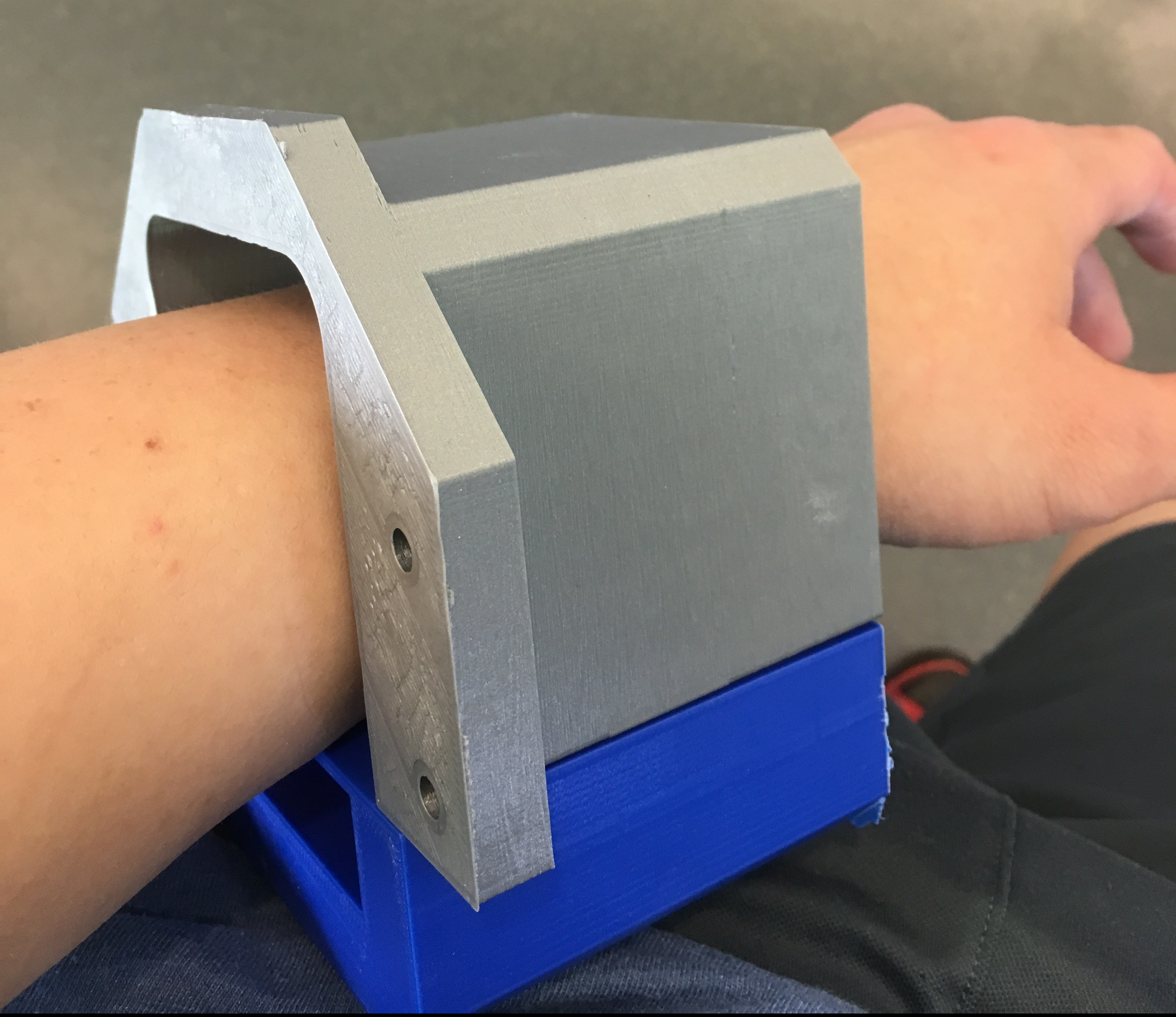
(7) Eventually, I thought of a better way to secure the gauntlet on my arm. Since the 93mm hole was mainly to fit my hand through, I decided to design a two-piece mount to lock around my wrist after my hand had already passed through.
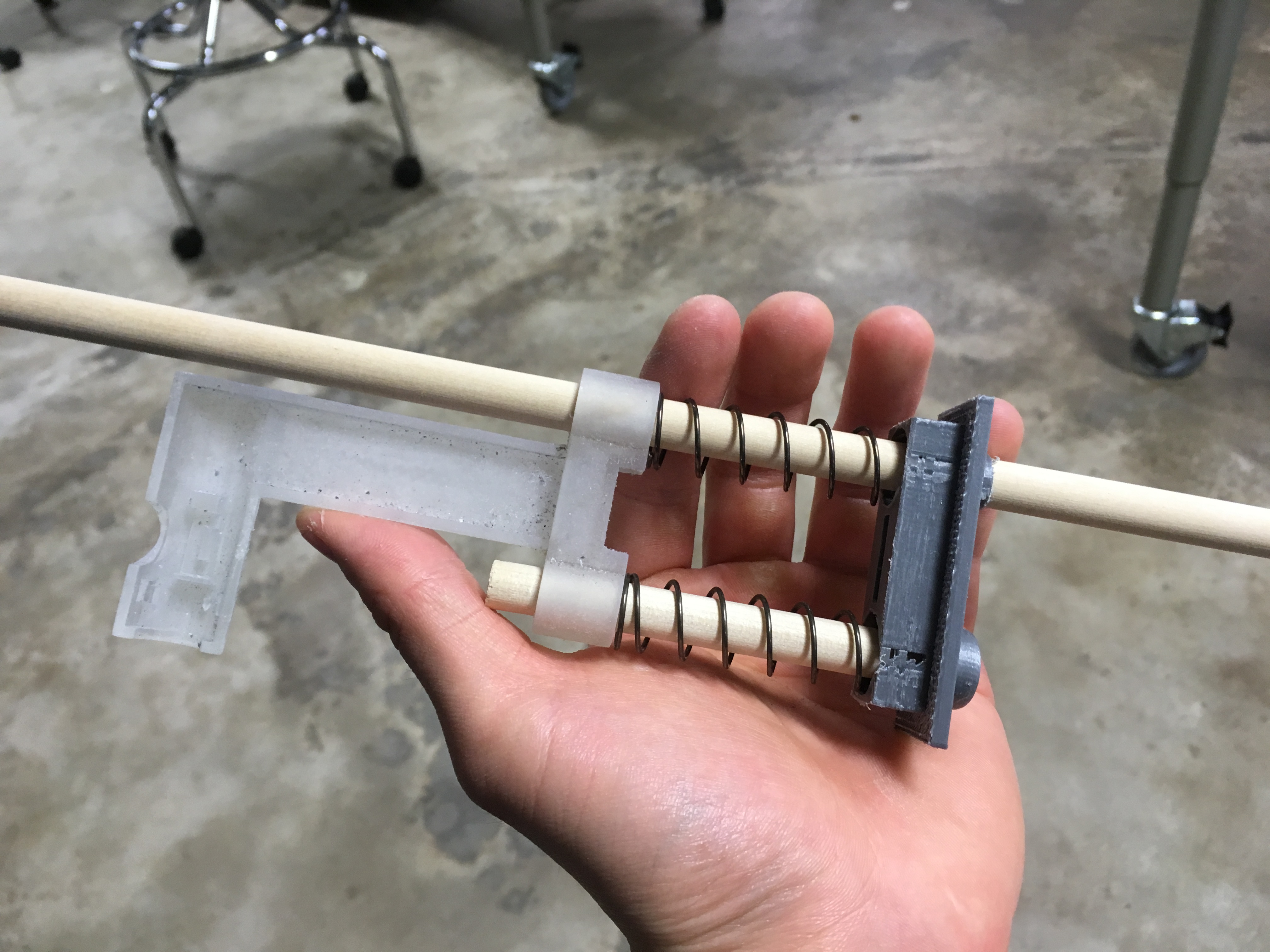
(8) The idea was to have a spring-loaded handle extend from the blue bottom piece in (7) for me to control the blade and autocannon. It would retract when not in use.

(9) Taped mockup of wrist block pieces and control handle.
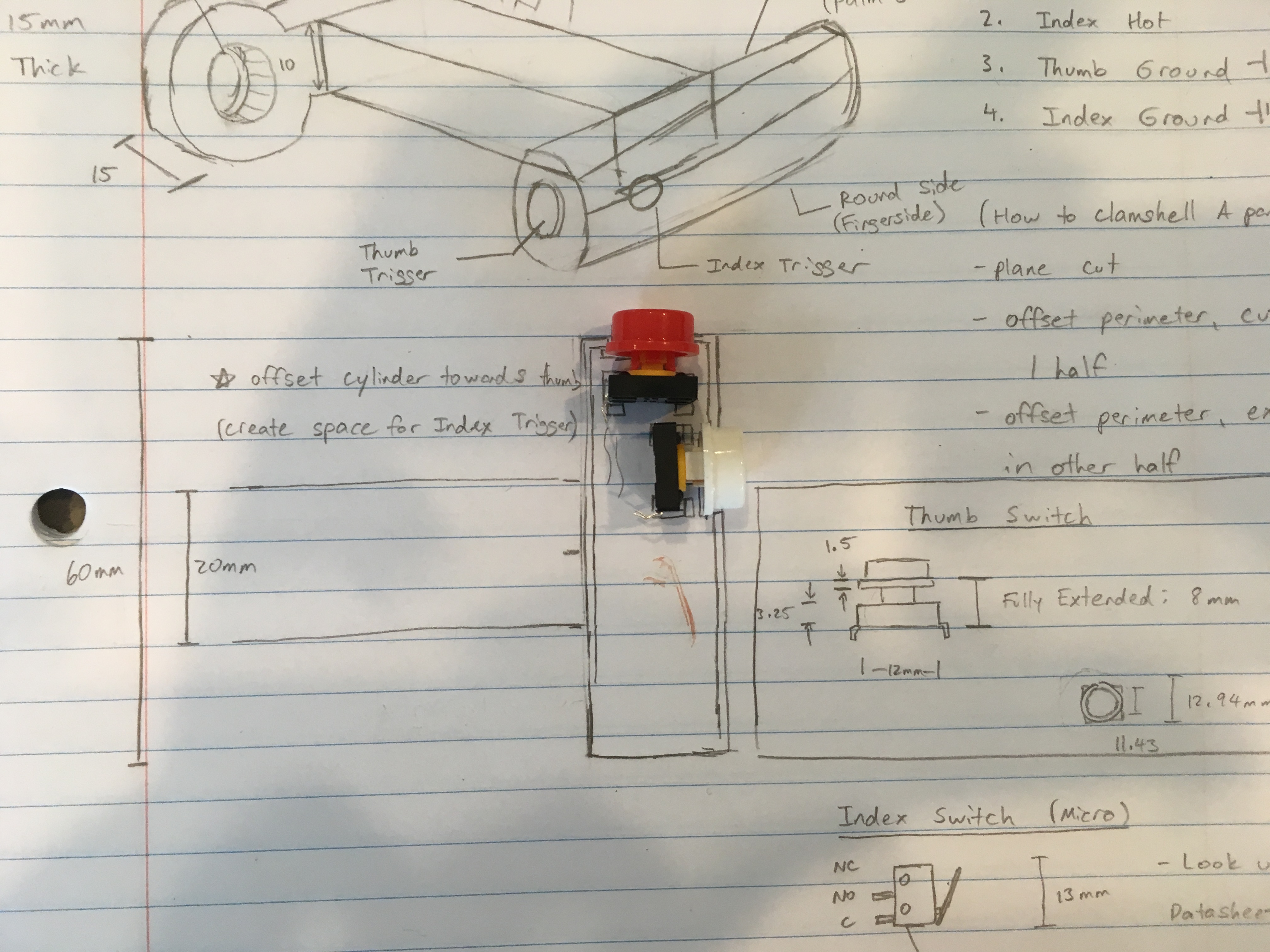
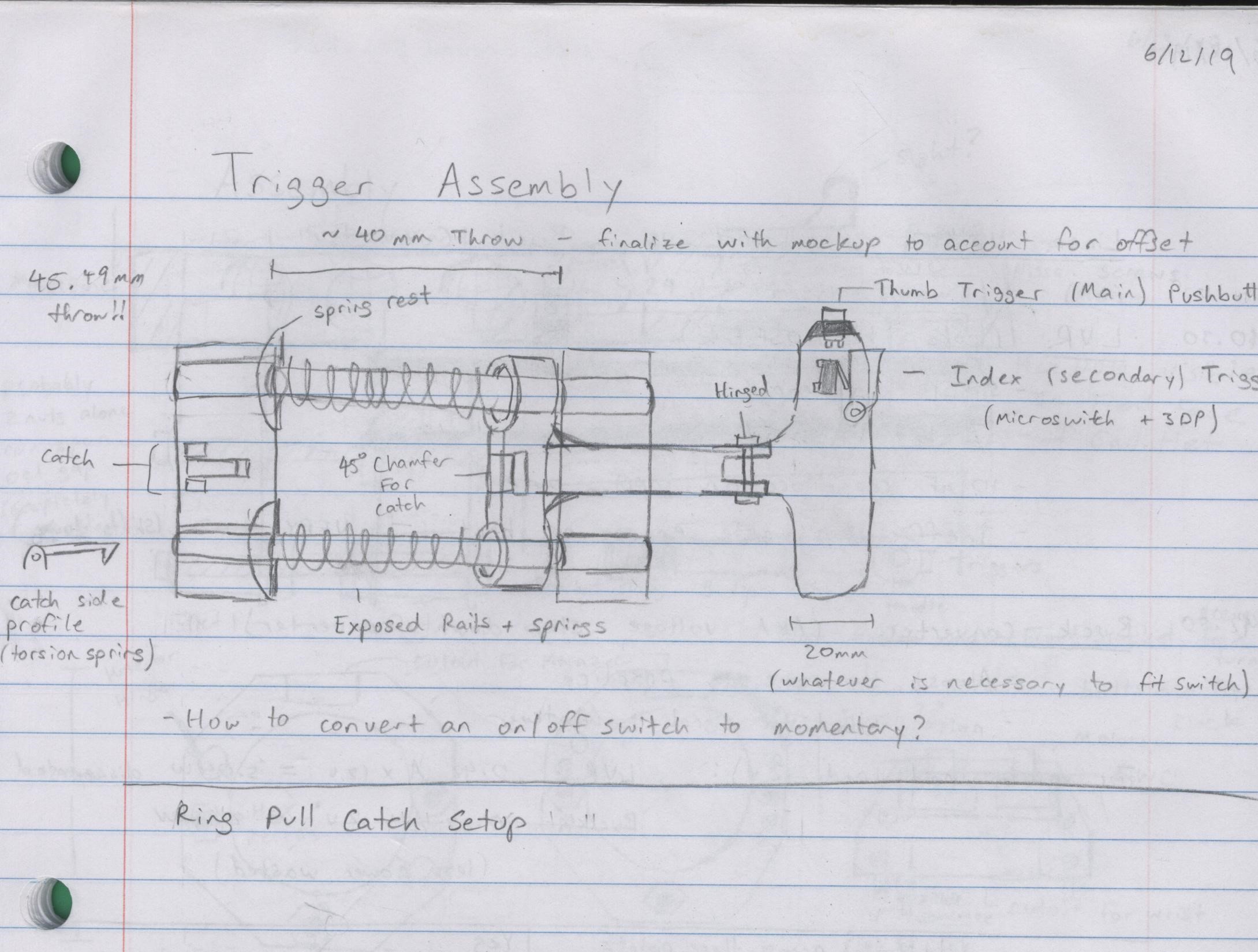
(10) Diagram of control handle, with switches placed in thumb and index finger positions.
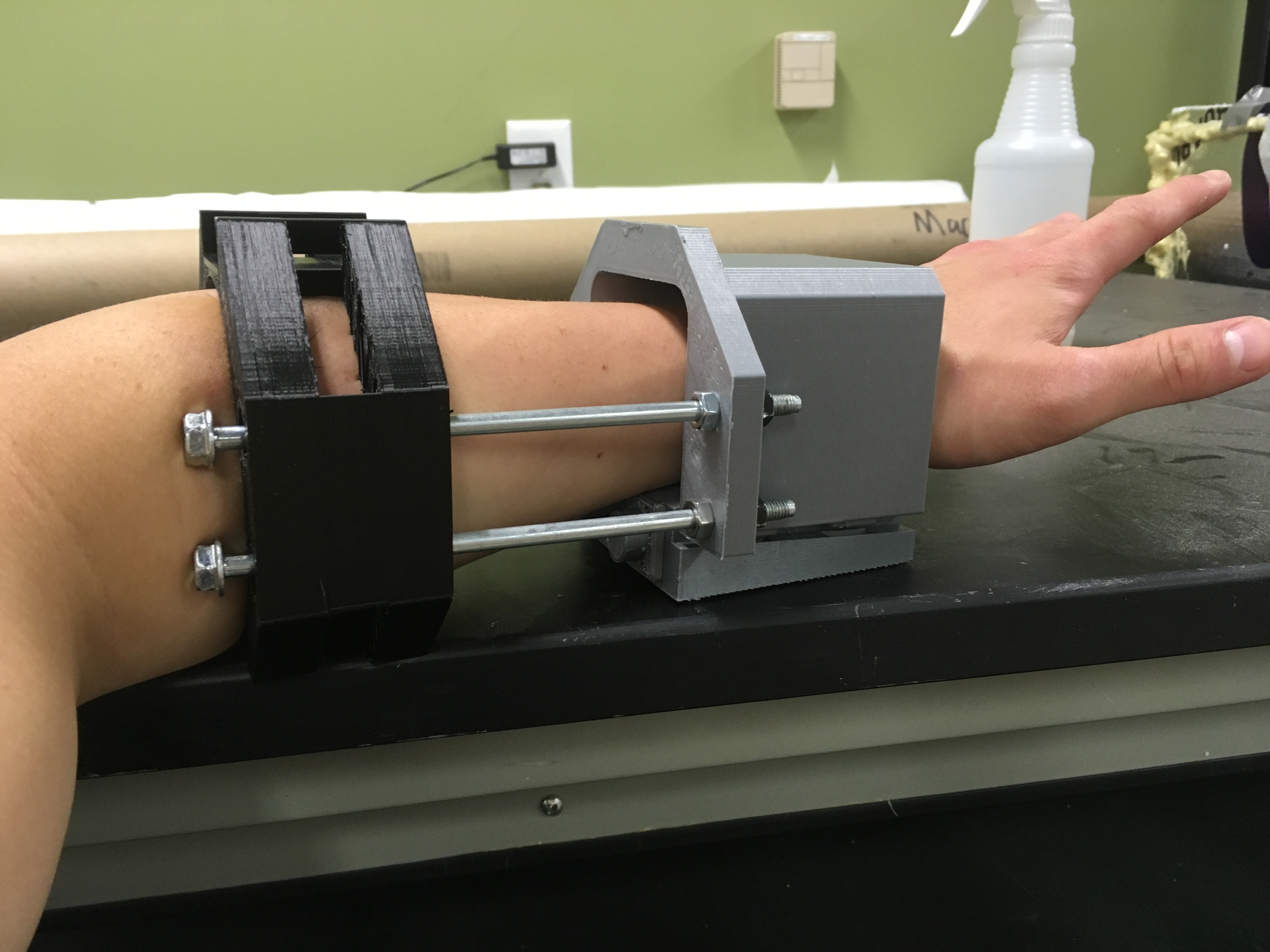
(11) I made the two octagons a single piece and added long M6 bolts as the ‘frame rails’ of the gauntlet. This let the gauntlet tighten around my arm but still be easy to slip on.
Mode: Shoot
I wanted my gauntlet to have a cannon, and given my background modifying Nerf guns, I decided to use their foam balls and a flywheel system to achieve this. 

(12) This is Hasbro’s magazine design. If I were to design a firing system that would accept these, I would need to make it fit and interface with all the complex contours and geometry you can see in the orange piece. I decided that doing so wouldn’t be a good use of my time, and so…
(13) Took some measurements and reverse-engineered my own, simpler version.


(14) A picture of the reverse engineered mag system. The spring loaded tab/gate on the bottom of the magazine prevents the follower from pushing all the balls out. It’s angled so that another piece with a complementary angle can depress it to release the ammo.
(15) Said complementary piece. I created the magazine well to both fit the mag’s outer perimeter and lock into the magazine’s gate.

(16) Demonstration of magazine releasing
(17) Demonstration of magazine releasing when pressed into magwell

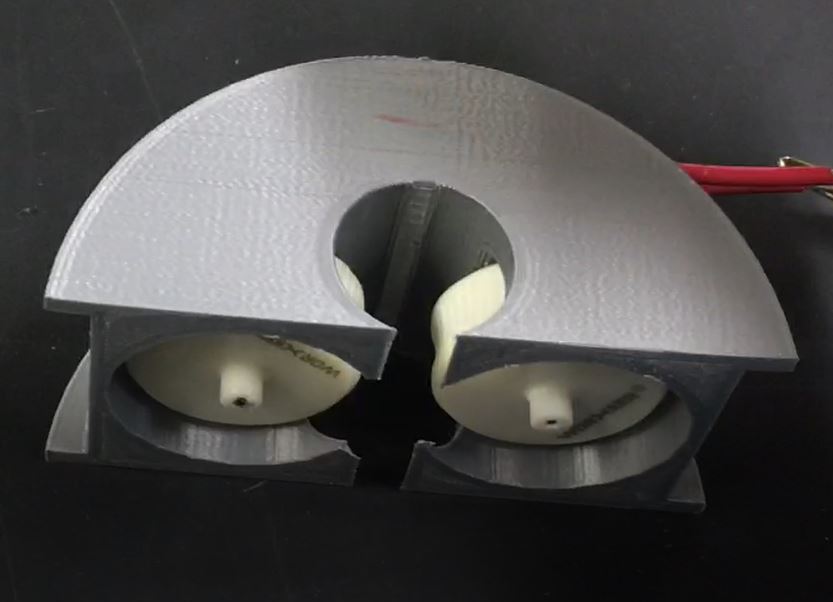
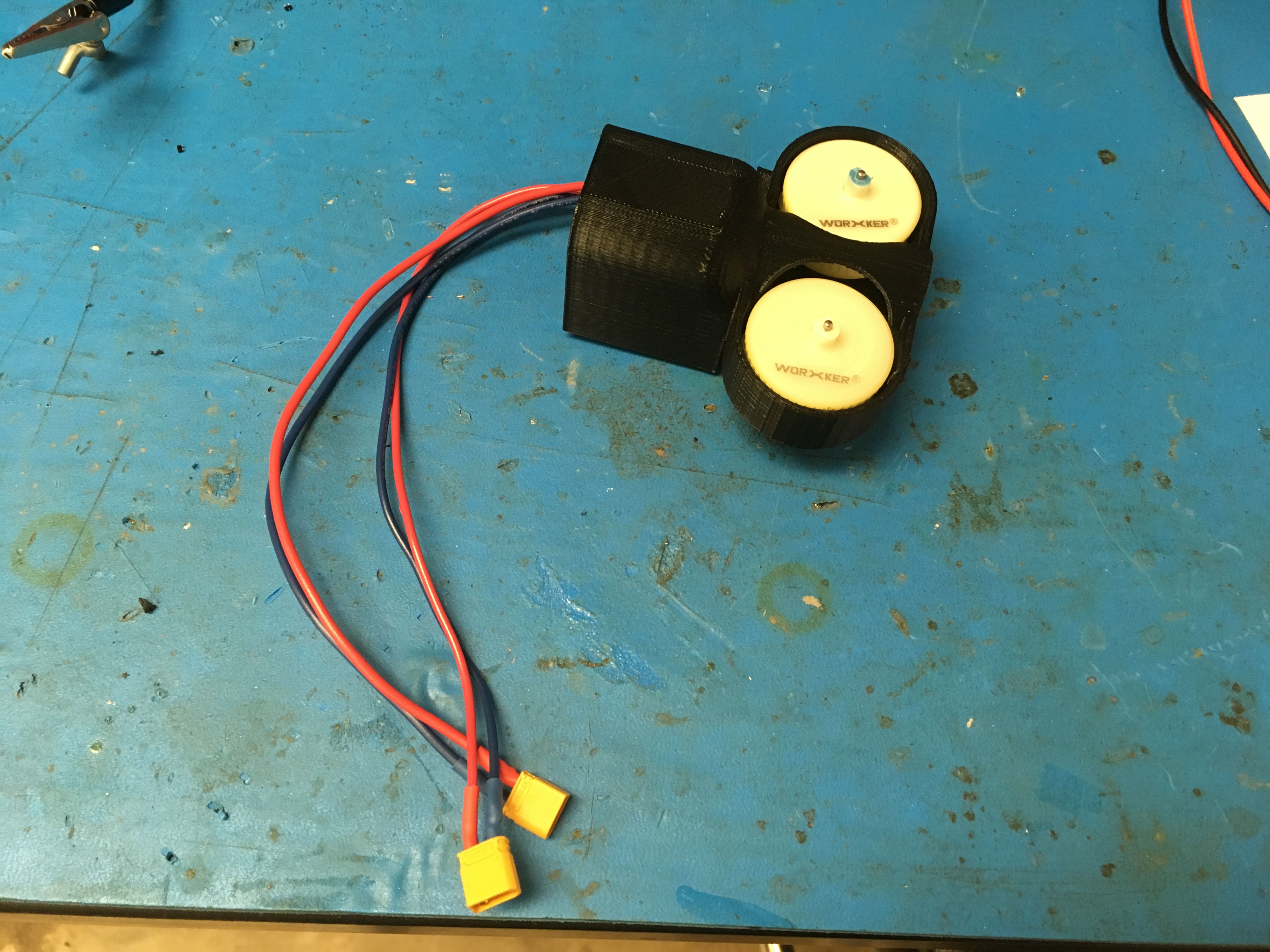
(18) In order to fire these balls, I opted to use a flywheel system (like a baseball pitching machine). This particular flywheel cage was one I designed in TinkerCad for another, unrelated application. The flywheels were purchased from the aftermarket company Worker.
(19) Another flywheel cage prototype, this time meant for the gauntlet. It has a semicircle profile because I was originally planning on using 4″ PVC pipe the body of the gauntlet. This cage would have fit inside of the pipe walls.
(20) Yet another iteration had the cage fused onto one of the octagons mentioned earlier. However, this design was not optimized for 3D printing and ended up being scrapped.
(21) Next, I created a really sleek, standalone cage setup, but it didn’t fit the gauntlet’s otherwise bulky, angular aesthetic. The geometries and setup themselves were solid, though, and were incorporated into the next design.


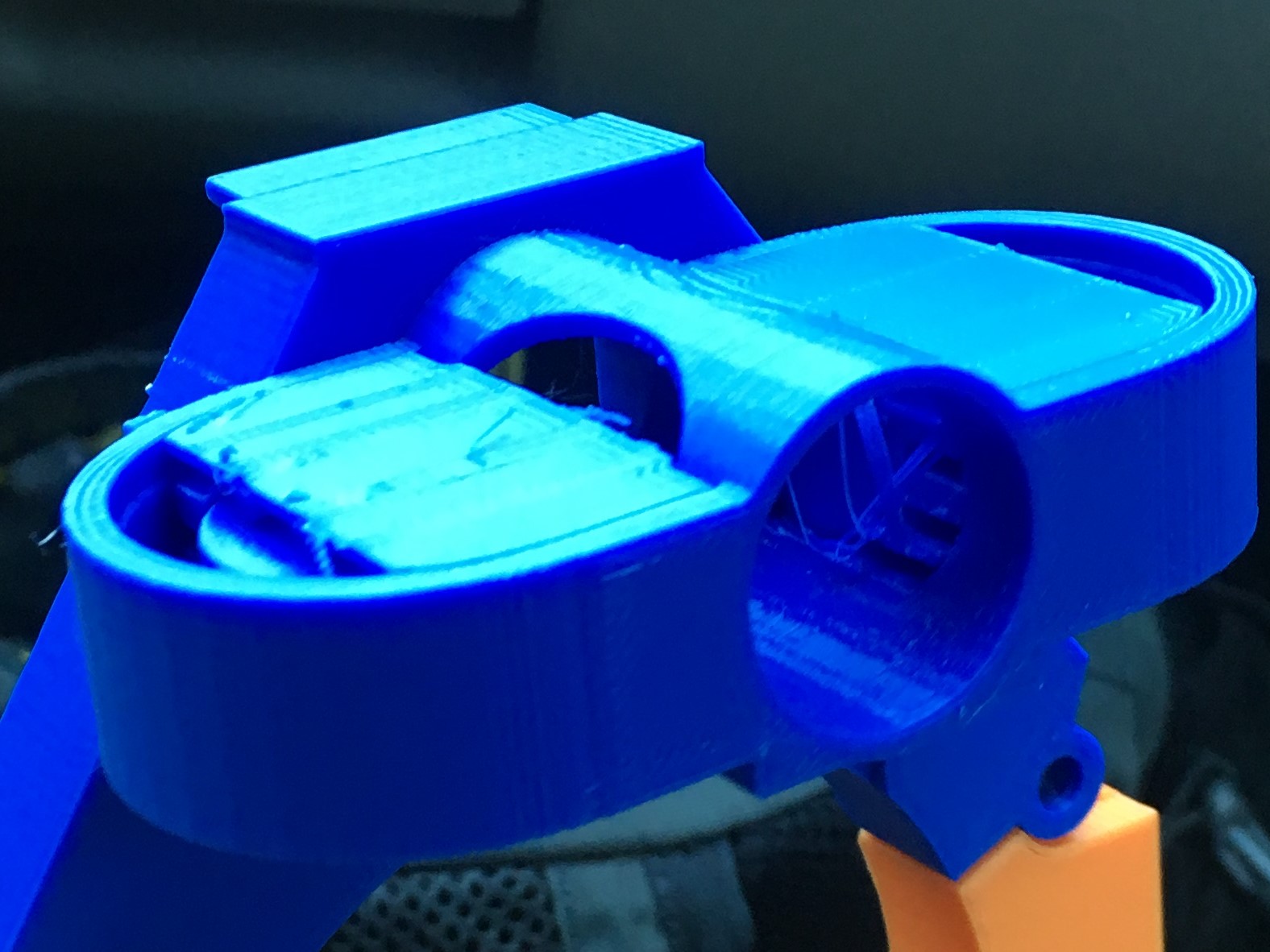
(22) In my next attempt, I simplified the cage geometry, and made it almost Brutalist in style. I even added a miniature ported barrel to the front haha.
(23) I embedded three motors into the cage: two to spin the flywheels, and another to turn a roller (circled in yellow) to control the rate of fire. Otherwise, the magazine would push all the balls into the flywheels at once, and I would have a shotgun instead of a machine gun. Which would actually be pretty cool…

(24) Firing video! This is with the rate of fire electronically limited to about ~50%, for both ammo conservation and the aesthetic. As in, I wanted boom-boom-boom-boom instead of BRRRRRTT.
Chassis, Part 2
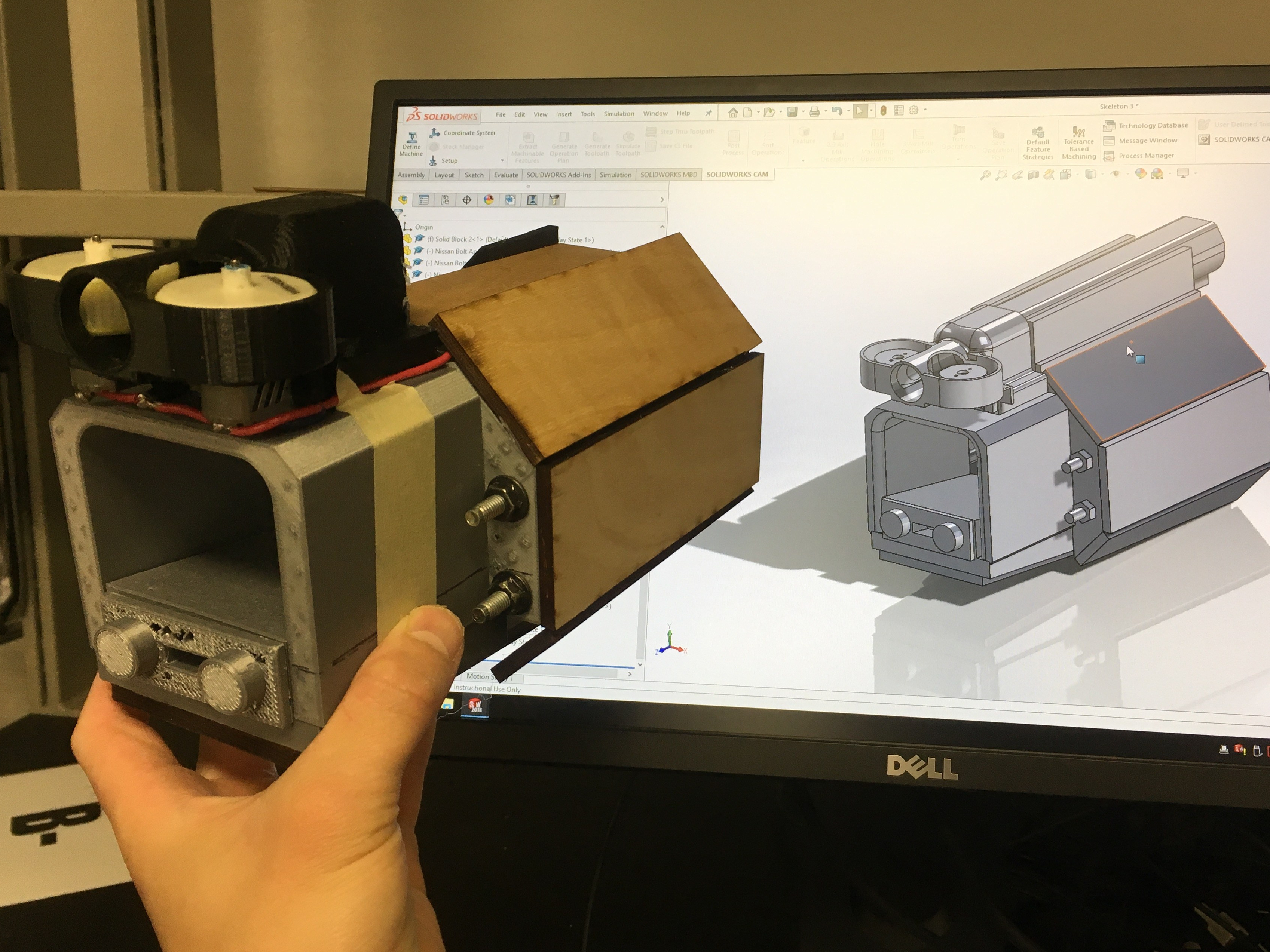
(25) The design evolved to have laser-cut wood slats as the outer skin of the gauntlet, fitting onto the flat faces of the octagons. Here is an early mockup compared to the CAD at that stage.
(26) I split the rear octagon into pieces so I could have half the gauntlet assembled and still reach my hands inside use tools and wire things in. The front wrist block kind of merged with the octagon idea, and has a taper towards the front. The holes littered throughout are for screws, nuts, and wires to fit through.
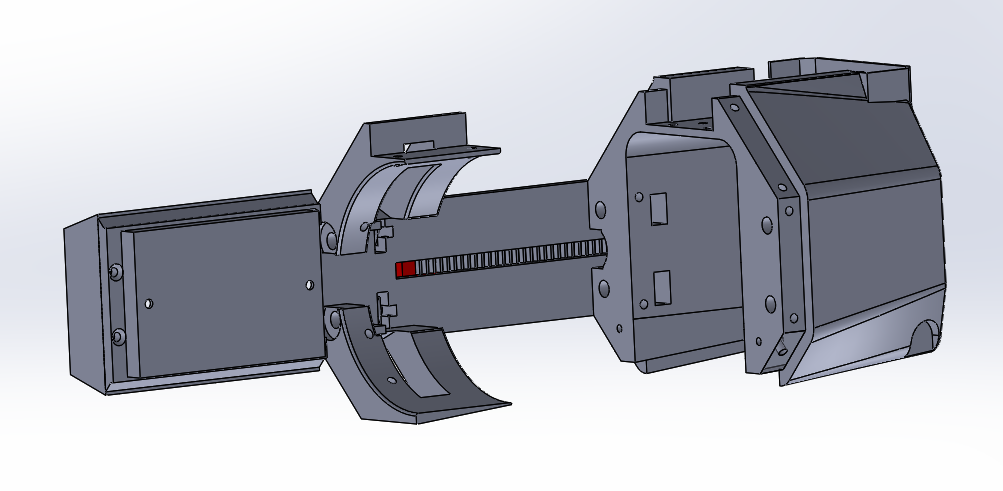
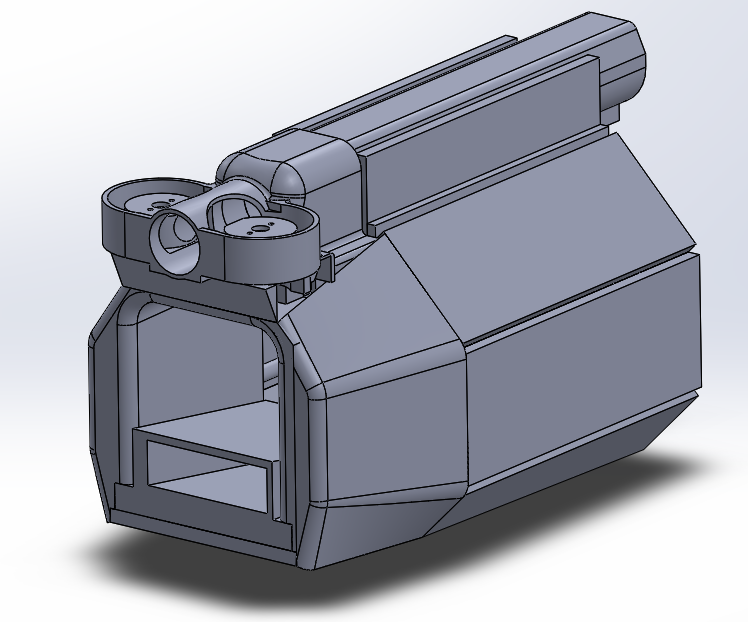
(27) CAD progression photo. I toyed with where to mount the autocannon, trying to decide between mounting on top, to the outside/blade, or underneath my forearm. I ended up top-mounting it.
(28) Added a rough mockup of the blade to the model. Notice the bolts above and below the blade; those are meant to be the rails it slides on, as well as the conductors to carry power to my LEDs inside of it. This might be clearer in image (29).
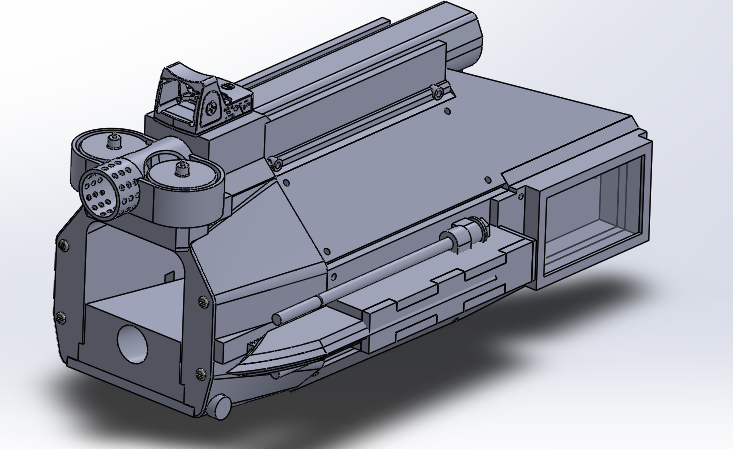
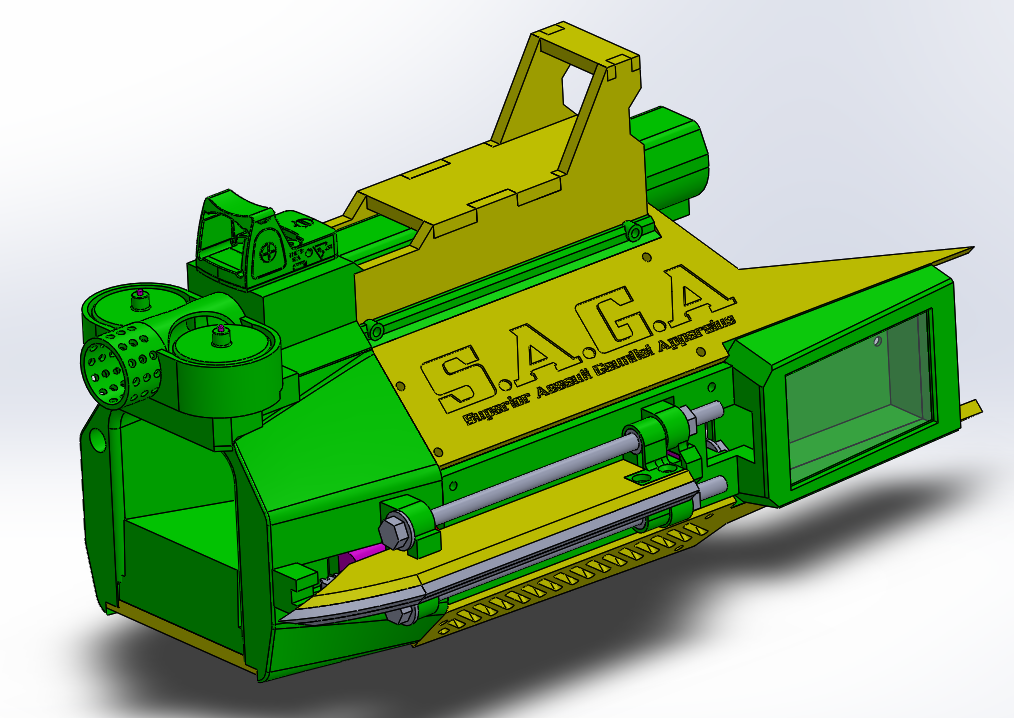
(29) Added all the cosmetic bits. This was really fun. I added a race car-esque wing, the name plate, a scope, and angled some of the panels to look more aggressive. I also chose to leave the blade exposed. I liked the look better this way.
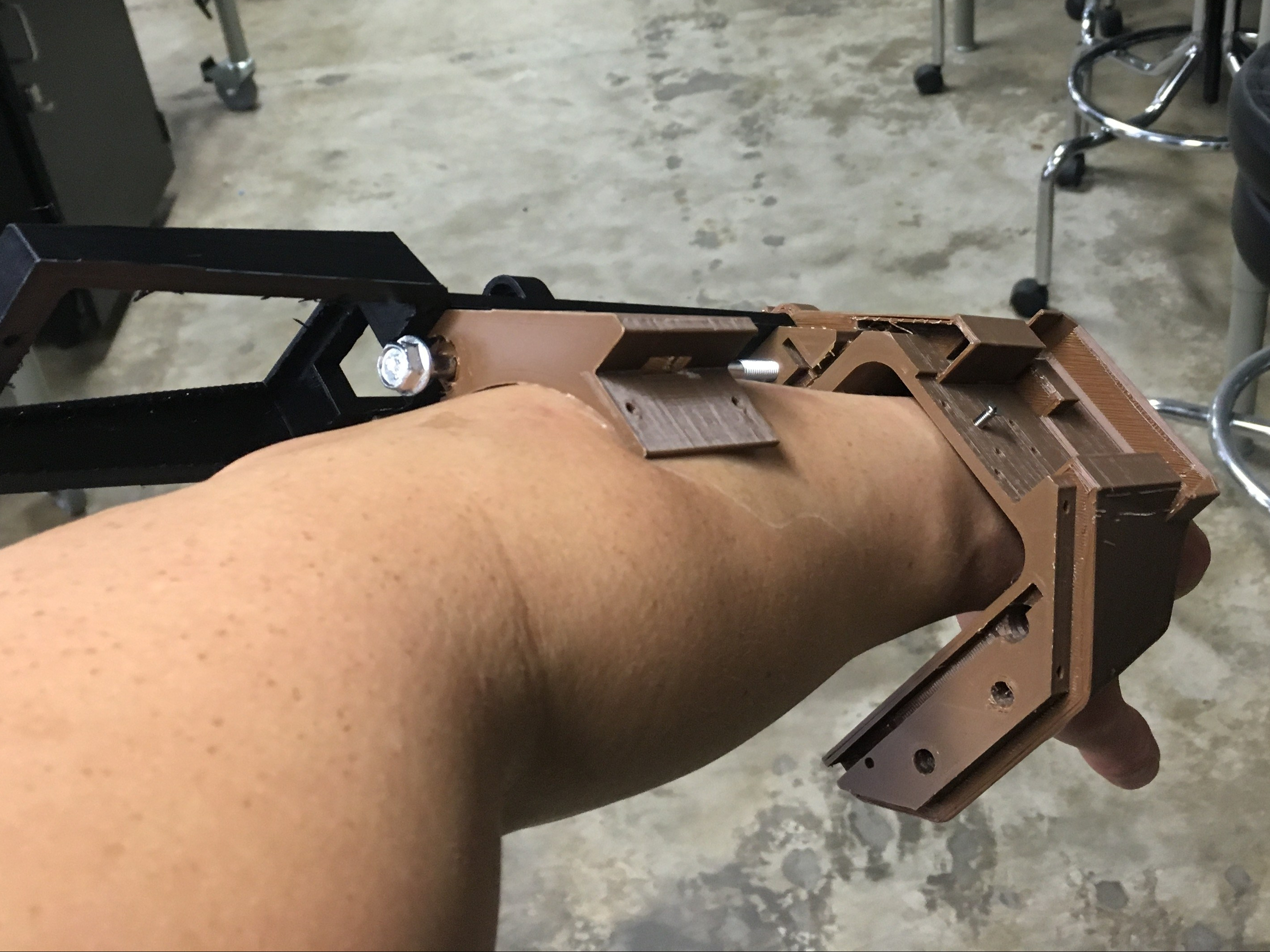

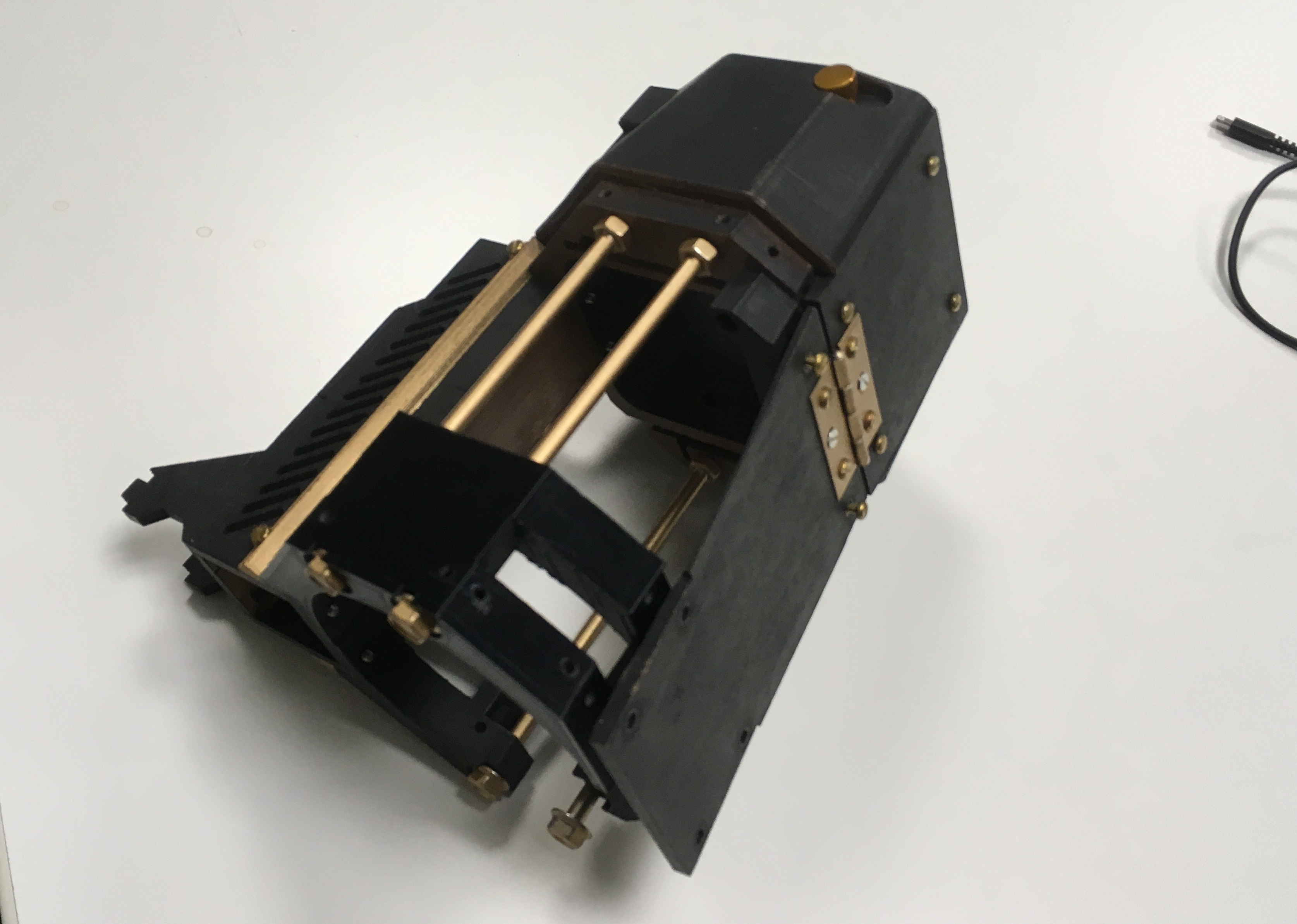
(30) Started final 3D prints. Here is a portion assembled and test fit onto my arm. The front wrist block piece alone (in brown) took 25 hours alone to print.
(31) Mockup with all the wood panels installed. Looking good!

(32) Full mockup. I really love how the name plate came out. I did it by first cutting the panel out of a larger piece of wood, then carefully removing the name panel while keeping the rest of the wood in the laser cutter. I painted the panel black, then placed it back into the laser cutter, using the other piece of wood as a template to ensure the lettering would be aligned properly.
(33) Painted everything black and gold. I even painted the internal bolts gold too. No stone left unturned. This color scheme looks so sick!

(34) Physical components complete! I even wore my Bakugo shirt for this photo XD
Mode: Slash
After the main body was taken care of, it was time to wrap up the blade system.
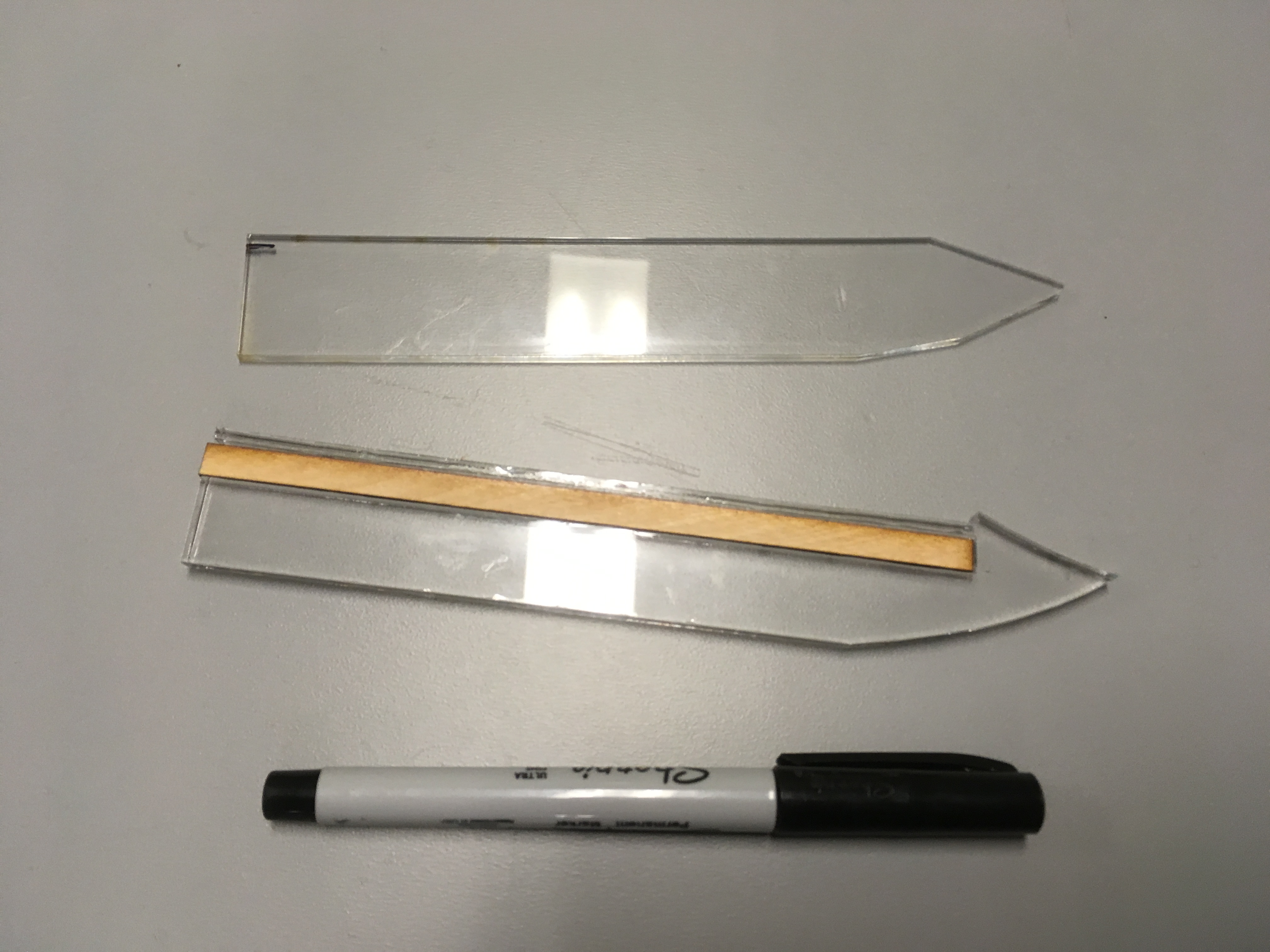
(35) I made my blade out of three pieces of sandwiched acrylic cut into a blade shape. The middle piece had a long slot cut into it to house the LEDs. In this photo, I have it supported with wood to prevent breakage.
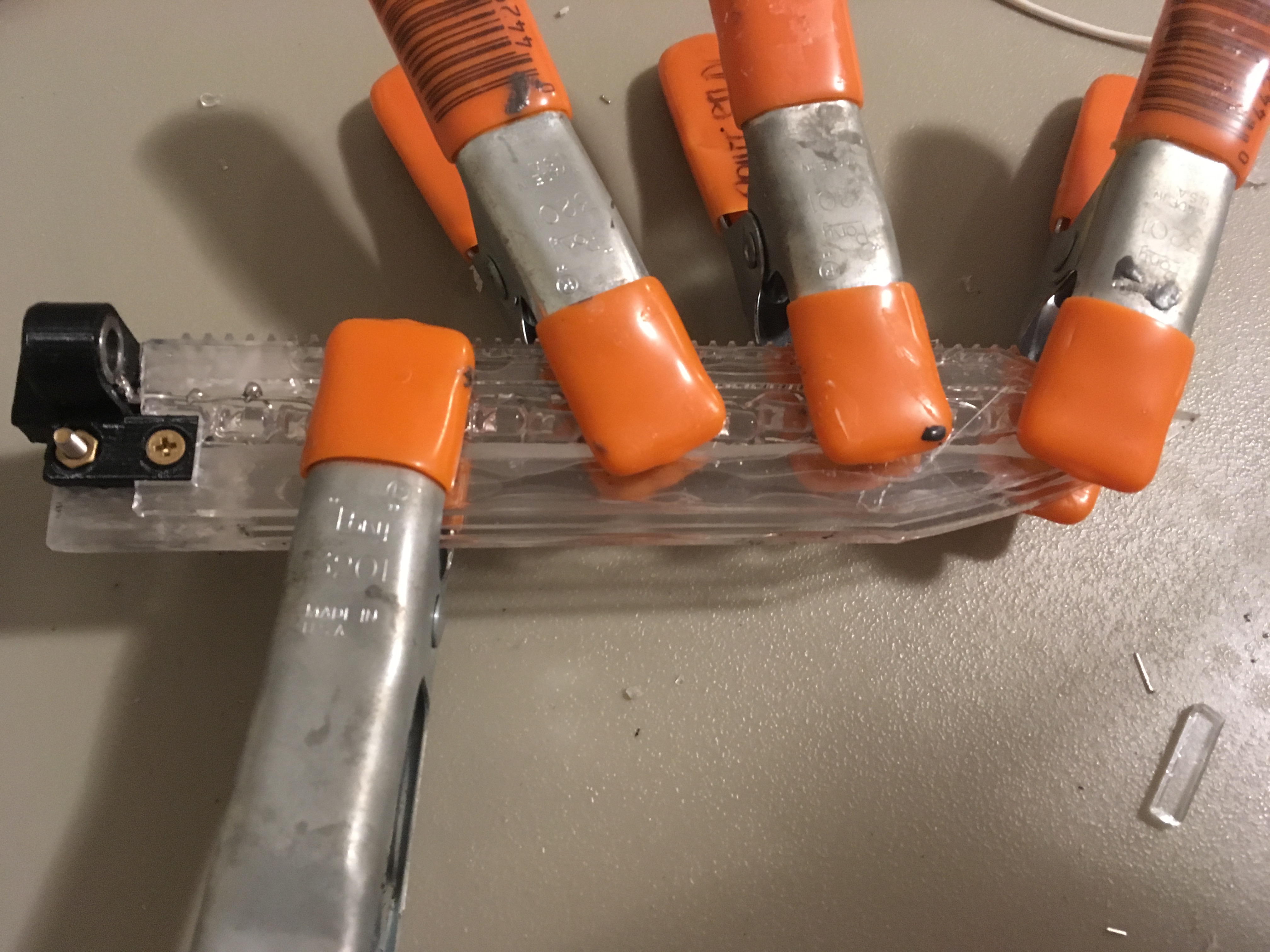
(36) After wiring in a LED strand and placing it into the slot, I used acrylic glue and clamps to fuse the blade into a single piece, with the LEDs encased inside permanently.
(37) I decided to use a worm gear instead of a conventional pinion gear to drive the blade’s gear rack, because of space constraints. With a worm gear, you can mount your motor parallel to the rack, whereas with a pinion, you have to go perpendicular.
I also think the idea of sticking a gear rack onto the back of the blade itself was a stroke of genius. The teeth look exactly like serrations you might find on a combat knife. The look and function fit together so perfectly.
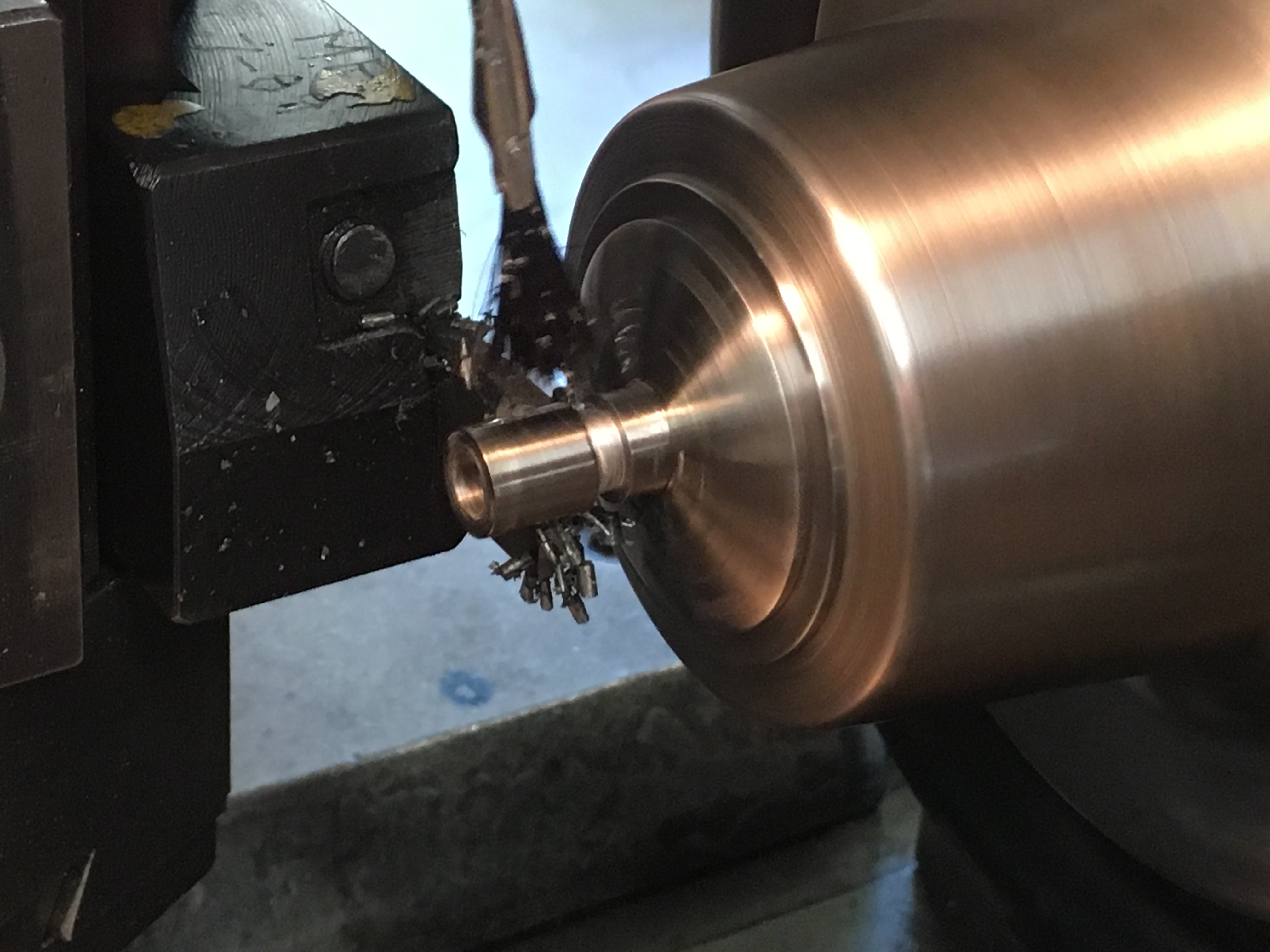
(38) Here I am lathing metal contacts sliders to be able to from carry current from the rails to blade LEDs themselves. While I could have wired to the LEDs directly, due to the sliding nature of the blade, it would have meant leaving a lot of slack in the wire, and trailing wires don’t look good. Plus I just wanted to flex my engineering muscles some.
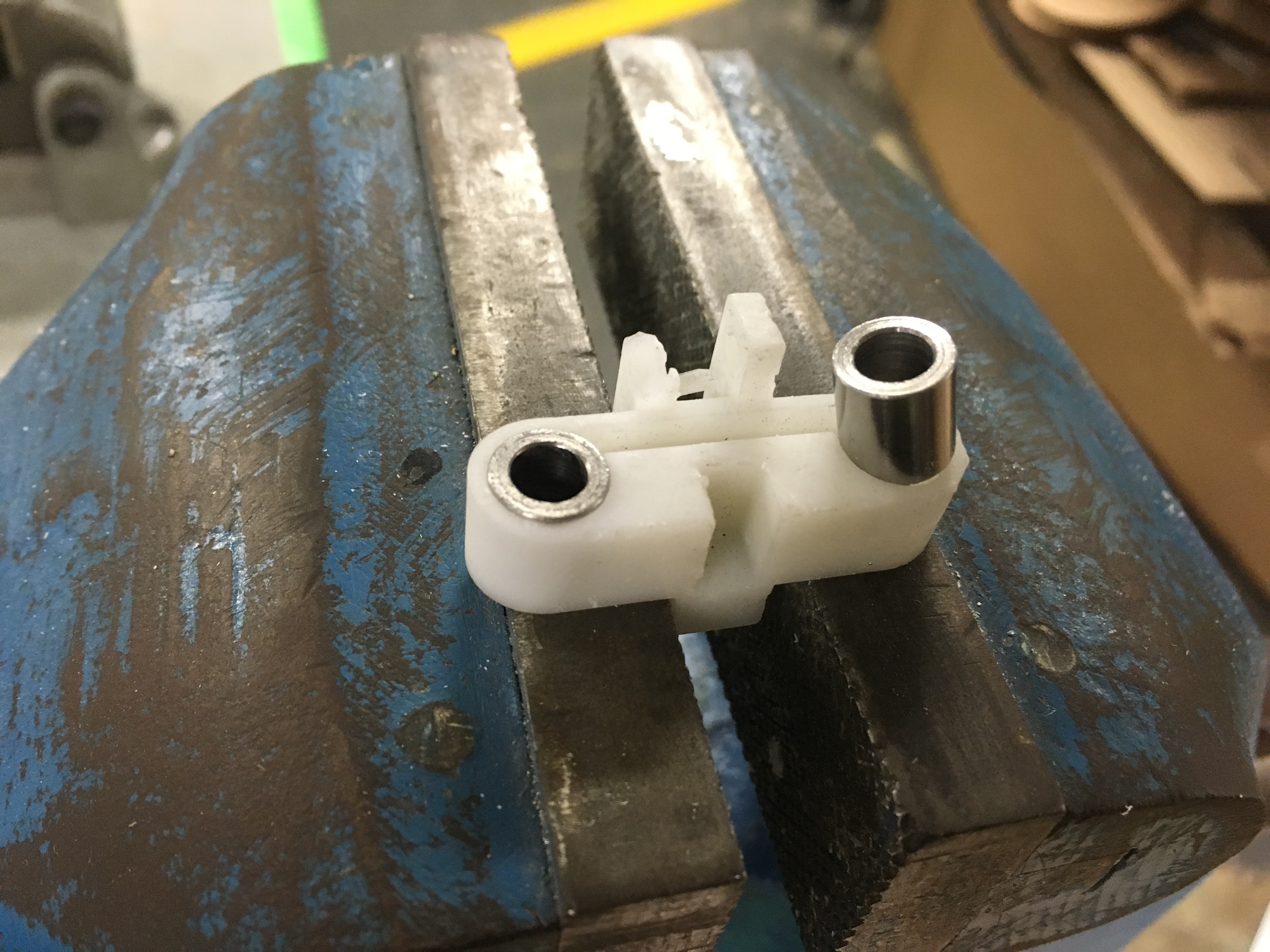

(39) Press fitting the lathed inserts into a 3D-printed blade sliding bracket.
(40) Bracket installed. You can see the LED strand as well.
(41) Test drive of gear drive and sliding electrical contact systems. Pretty damn badass.
Control Systems
Since there were a lot of things going on in this project, I needed some way to manage it all. I spent the summer learning Arduino and coding controls for all my inputs and outputs.
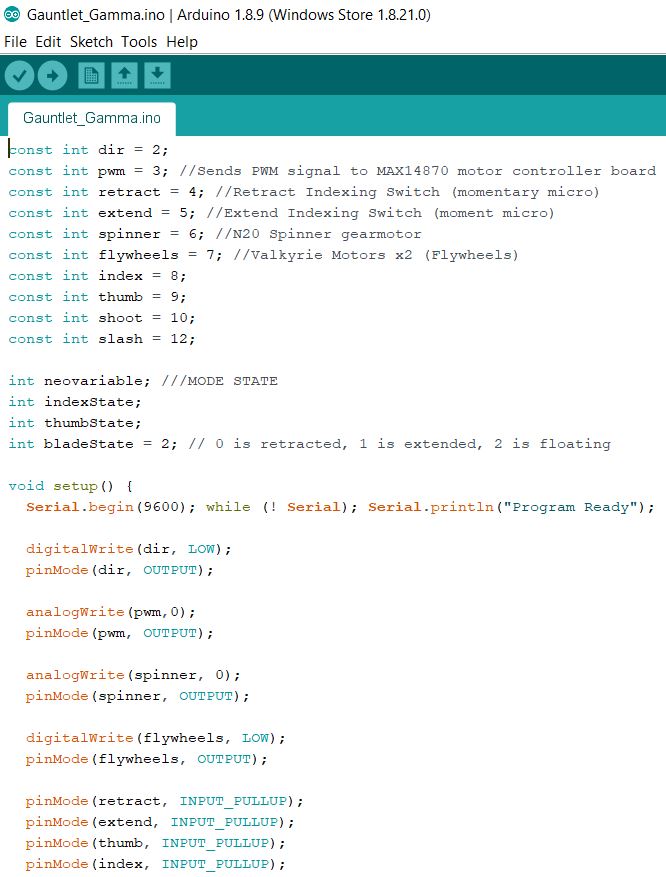
(42) Here is some of my code. I just followed tutorials and trial-and-errored everything until it worked. Basically, once the arduino is powered on, it stays in standby until one of two modes is selected: shoot or slash. Then from there, two microswitches mounted on my index finger control the flywheels/roller, or blade extension/retraction, depending on the mode. In addition, I also included another set of switches placed as sensors for the blade system, to stop the blade motor once it was fully extended or retracted. This way I could prevent burning out my motor and breaking gear teeth.
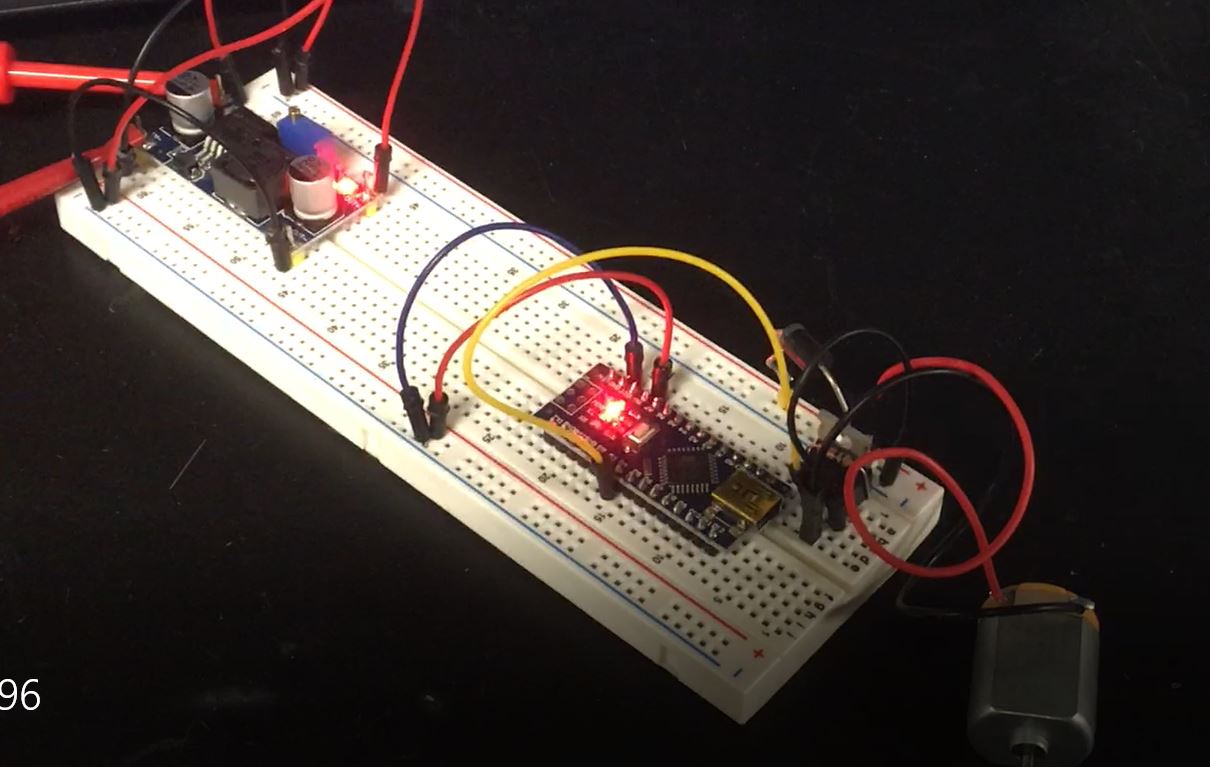
(43) I used a Chinese Arduino Nano clone to run my program, and a buck converter to power it. My main power source was a 3S (11.1v) lipo battery, and the Arduino runs on 5v. I could have used a linear voltage regulator, but from my research they seemed to be less efficient than buck converters. The 3S was chosen (as opposed to something closer to 5v) because my motors all ran on 12v.
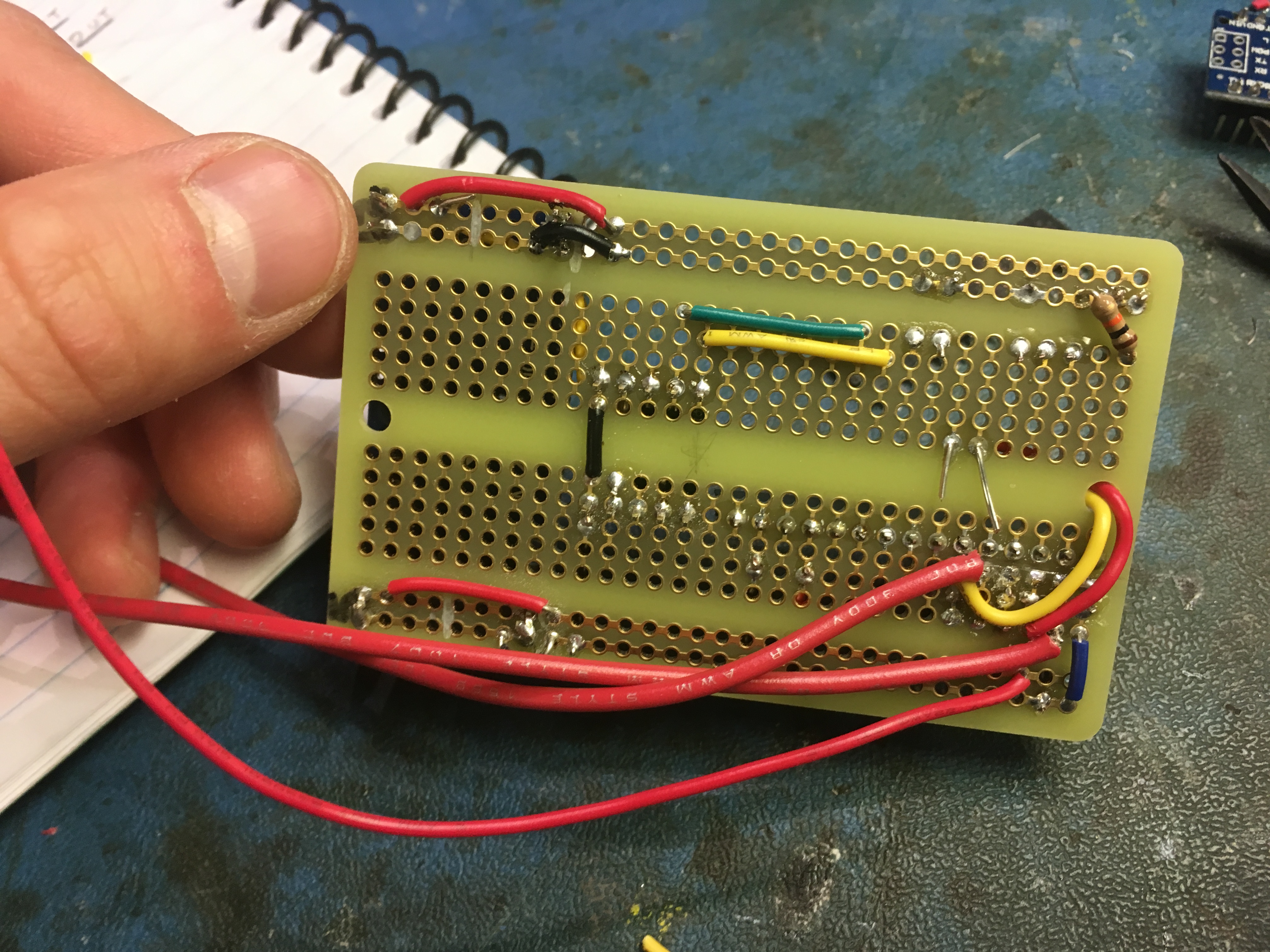
(44) Since I didn’t know how to mill PCBs yet, I wired everything by hand using a perma-proto board. If you look closely, you’ll see some traces dremeled away. I did this to subdivide groups of traces into my own custom ‘zones’ so I could fit more components in.
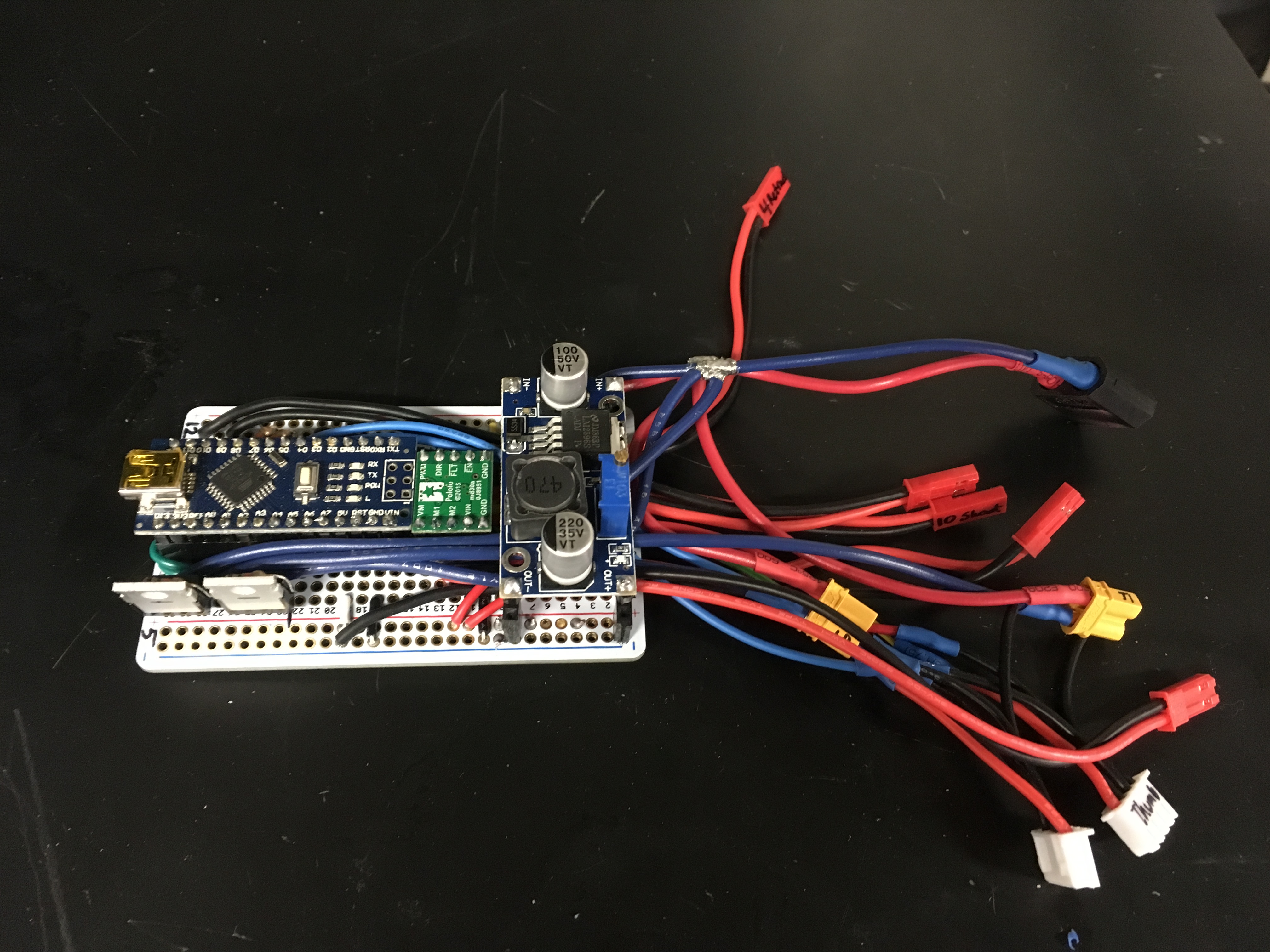
(45) Completed circuit board. I added connectors to the end of each wire so I could easily connect motors/switches/etc. for testing, but still dismantle everything before the final assembly. The green board is an H-bridge motor driver. It let me run one of my gearmotors in both forward and reverse to drive my retractable blade. I even used some spare 3S battery balance plugs as 4-conductor connectors.
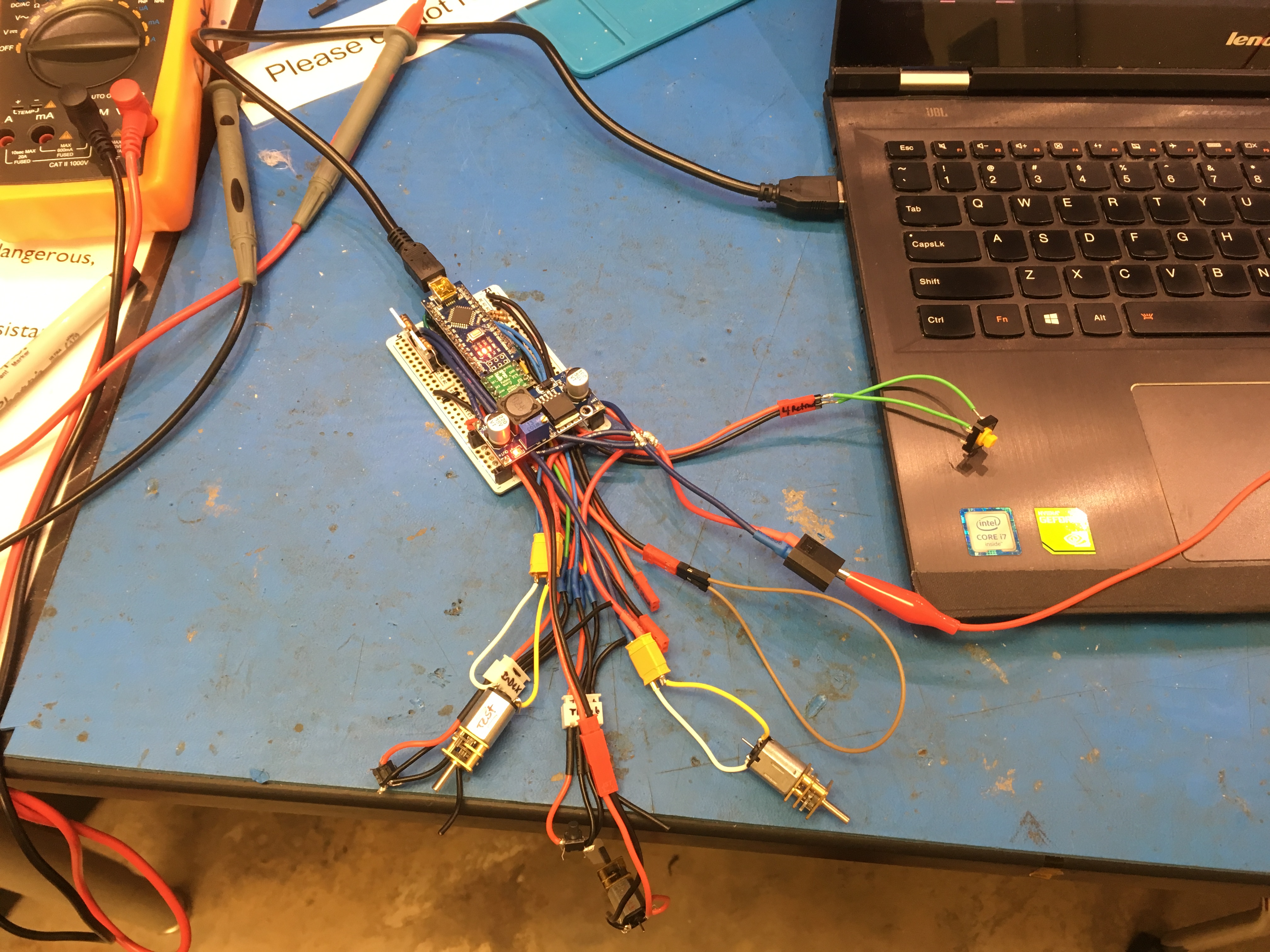
(46) Testing the program with all components temporarily connected. This took a few tries, and I had to rewrite the code a bunch.
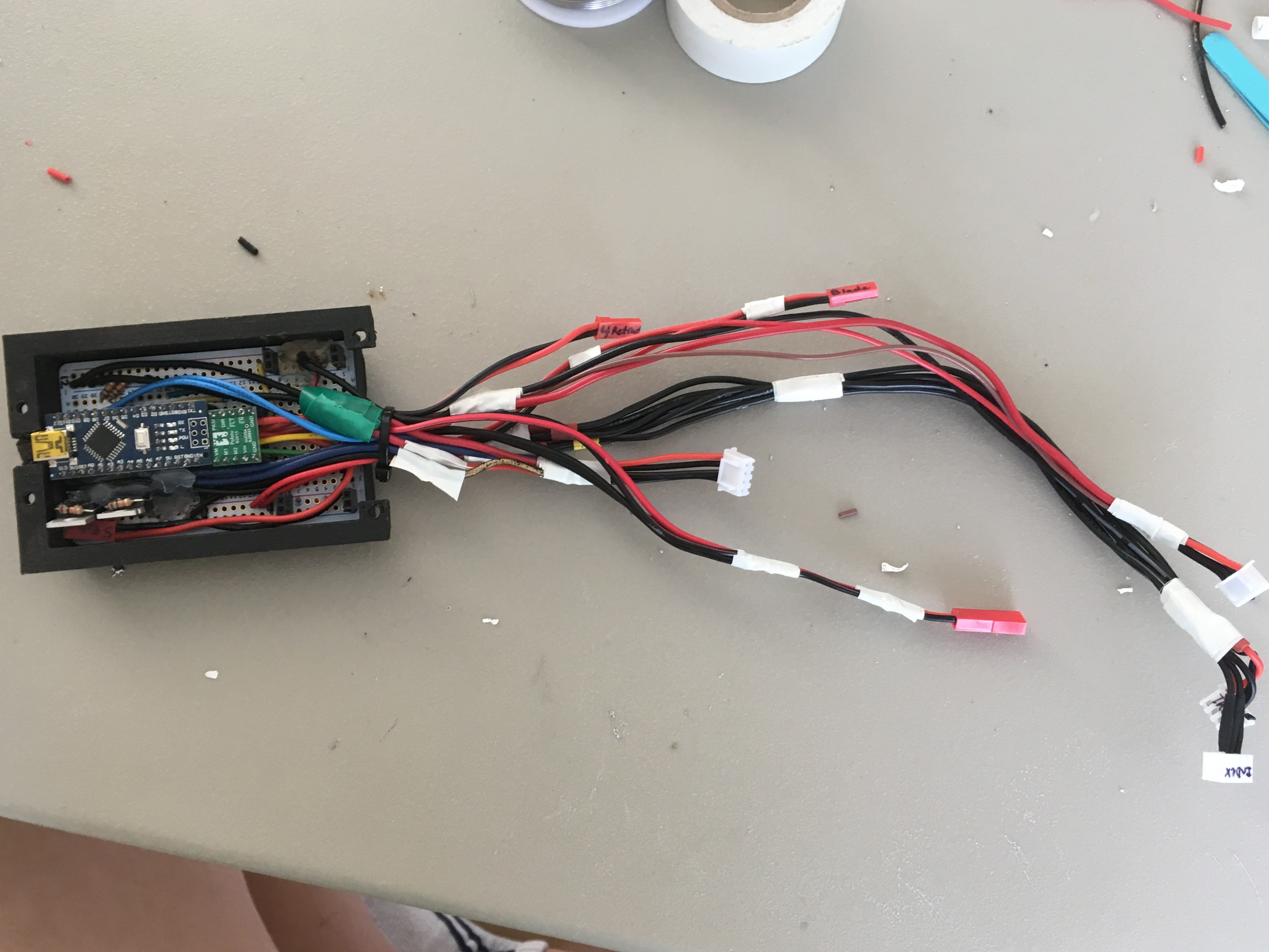
(47) I mounted the board in a 3D-printed tray, rewired all the cables to the correct lengths for mounting, then bundled them together according to their destinations.
Assembly
With all subsystems tested and working, (and with summer coming to a close) I raced to finally finish this project.

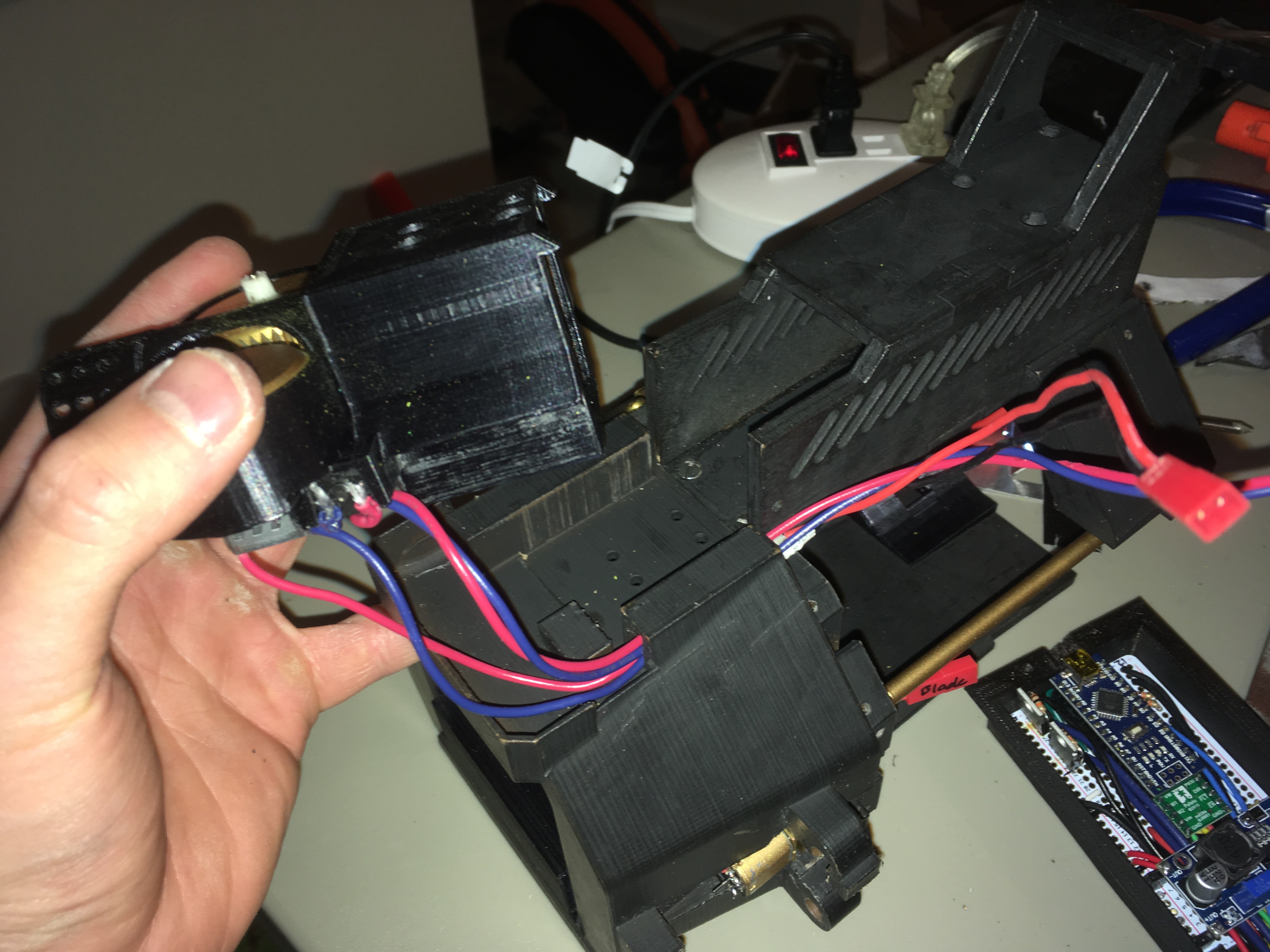
(48) I included channels in my design for wires to pass through without being exposed. In this photo you can see the leads for the flywheel and roller motors going through their housing in the wrist block.
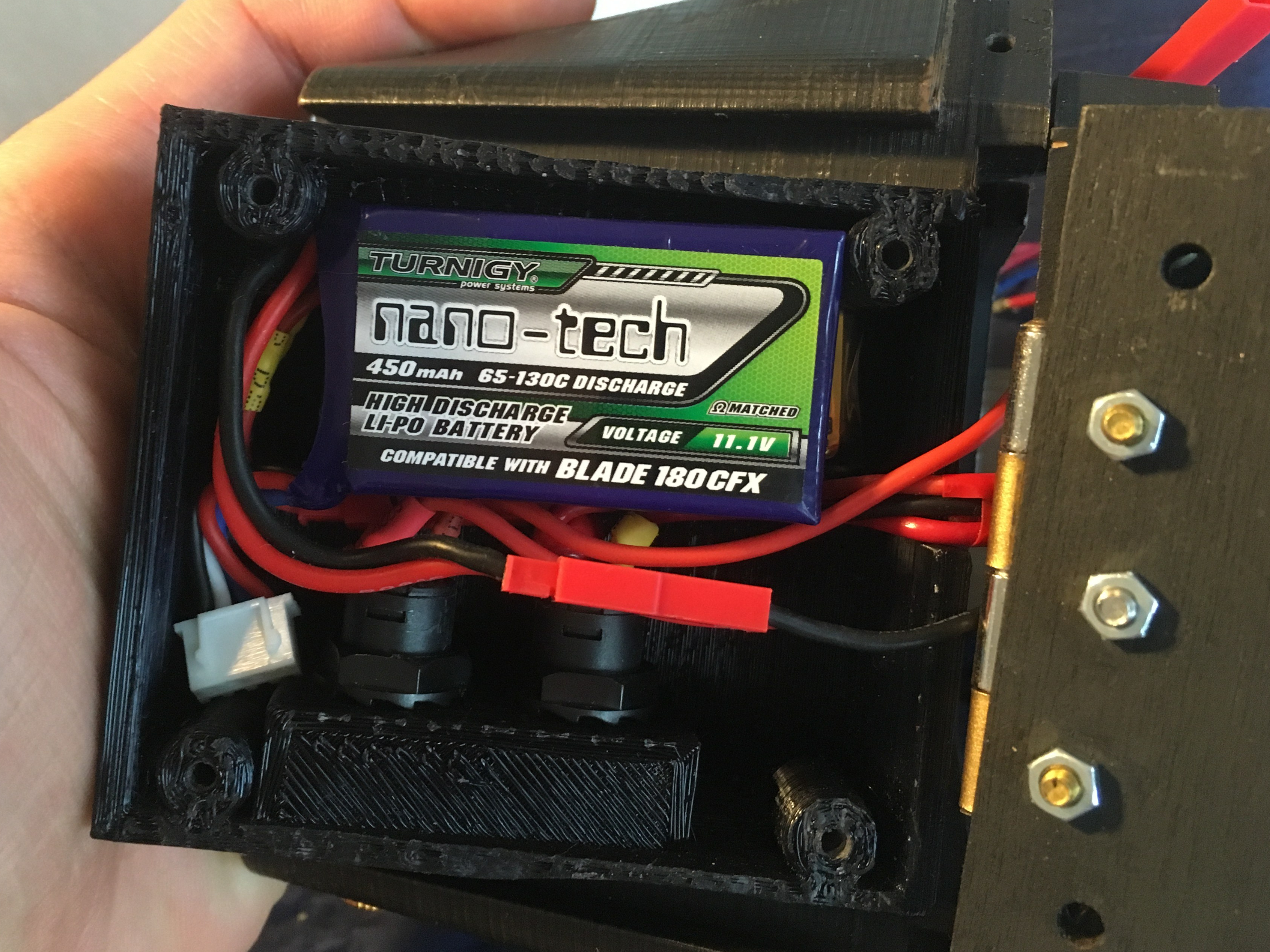
(49) Battery and power buttons mounted into a hinged compartment mounted palm-side underneath my wrist. These switches are actually inaccessible when the compartment is locked into place around the wrist, and are only usable when the hinge is unlatched for wearing or removing the gauntlet. Which in practice are the only times you would be powering it on or off anyway. The hinged compartment locks in with a spring-loaded pin and magnets.
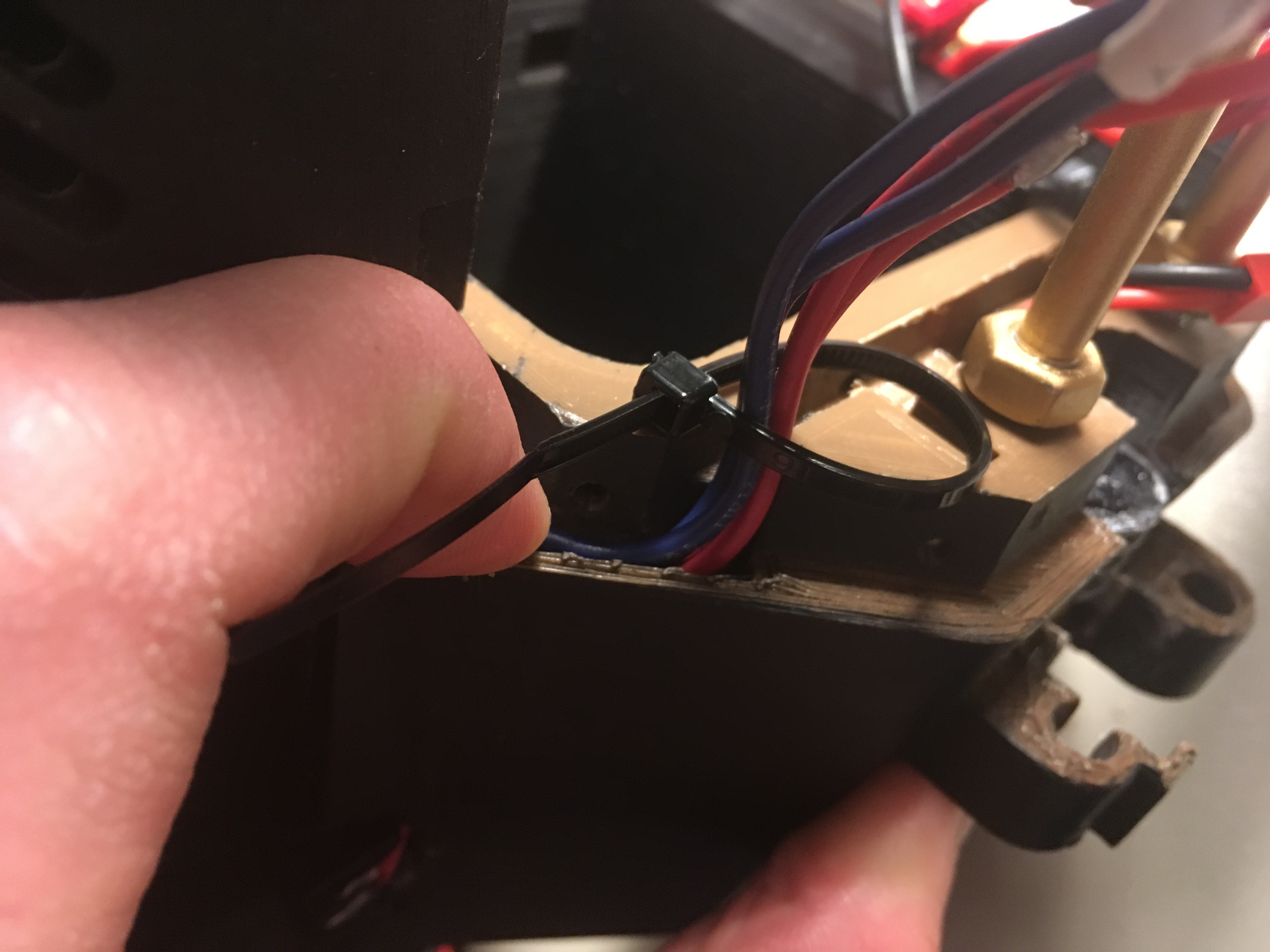
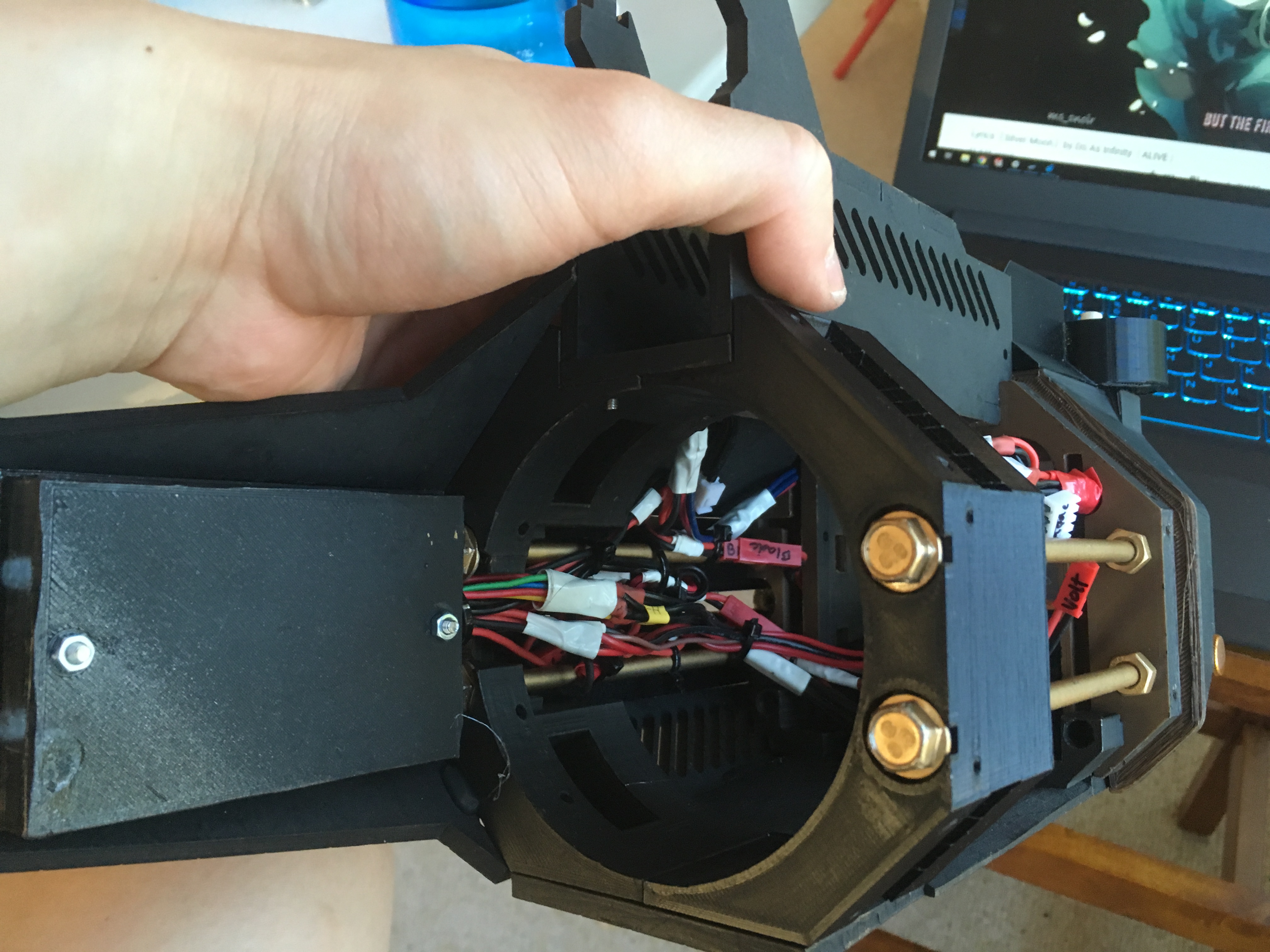
(50) Many zip ties were used to secure wire bundles to the long M6 bolts. In this way the bolts acted as both a skeleton for the physical structure and anchor points for the electronics.
(51) All cabled connected, moments before final assembly.
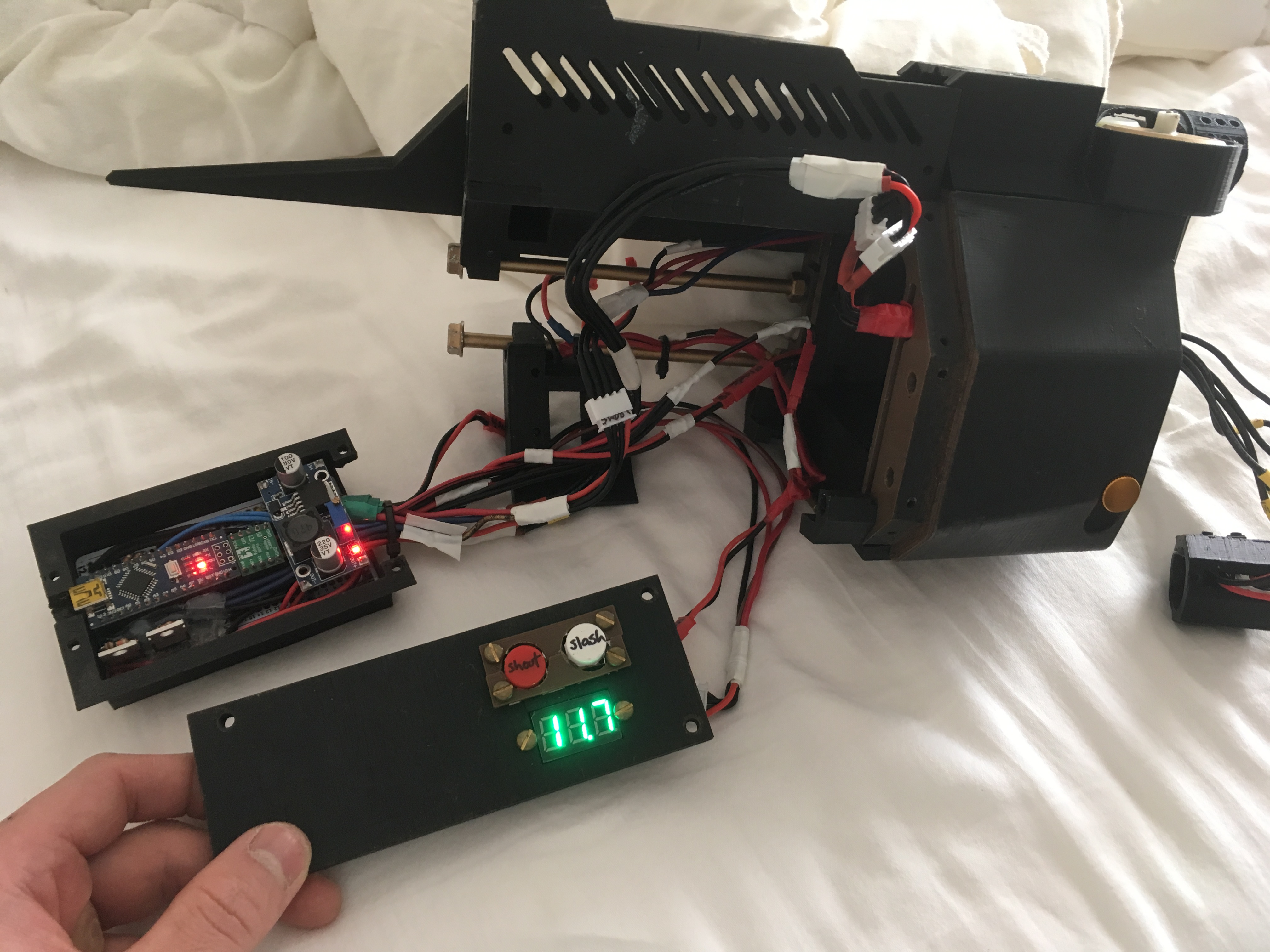
(52) Here is the wiring loom installed. The box with the two nuts is the tray for my circuit board, where it sits facing outward. I left a hole in the back for a Mini-USB, so I can actually reprogram this gauntlet on the fly (whether to adjust ROF or scale down autocannon power/whatever).
Here’s a demonstration video of the whole thing completed! I’ll embed another, more comprehensive walkaround video when I have time.
Extras
Here are some extra photos that didn’t really fit in here anywhere else.


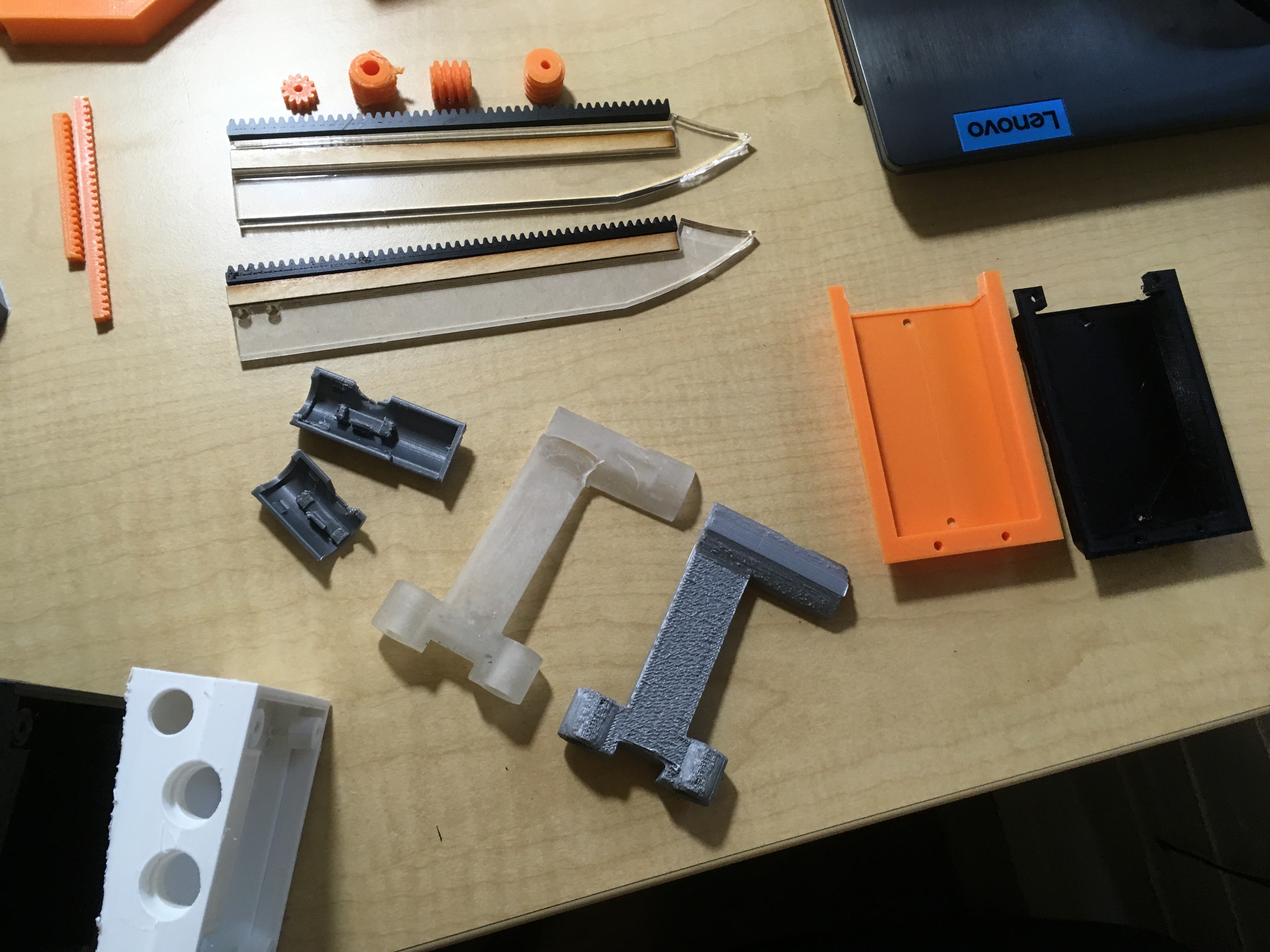

(53, 54, 55, 56) Most of my prototype parts, arranged in groups and in chronological order. You can see the evolution of each piece as the build went on.
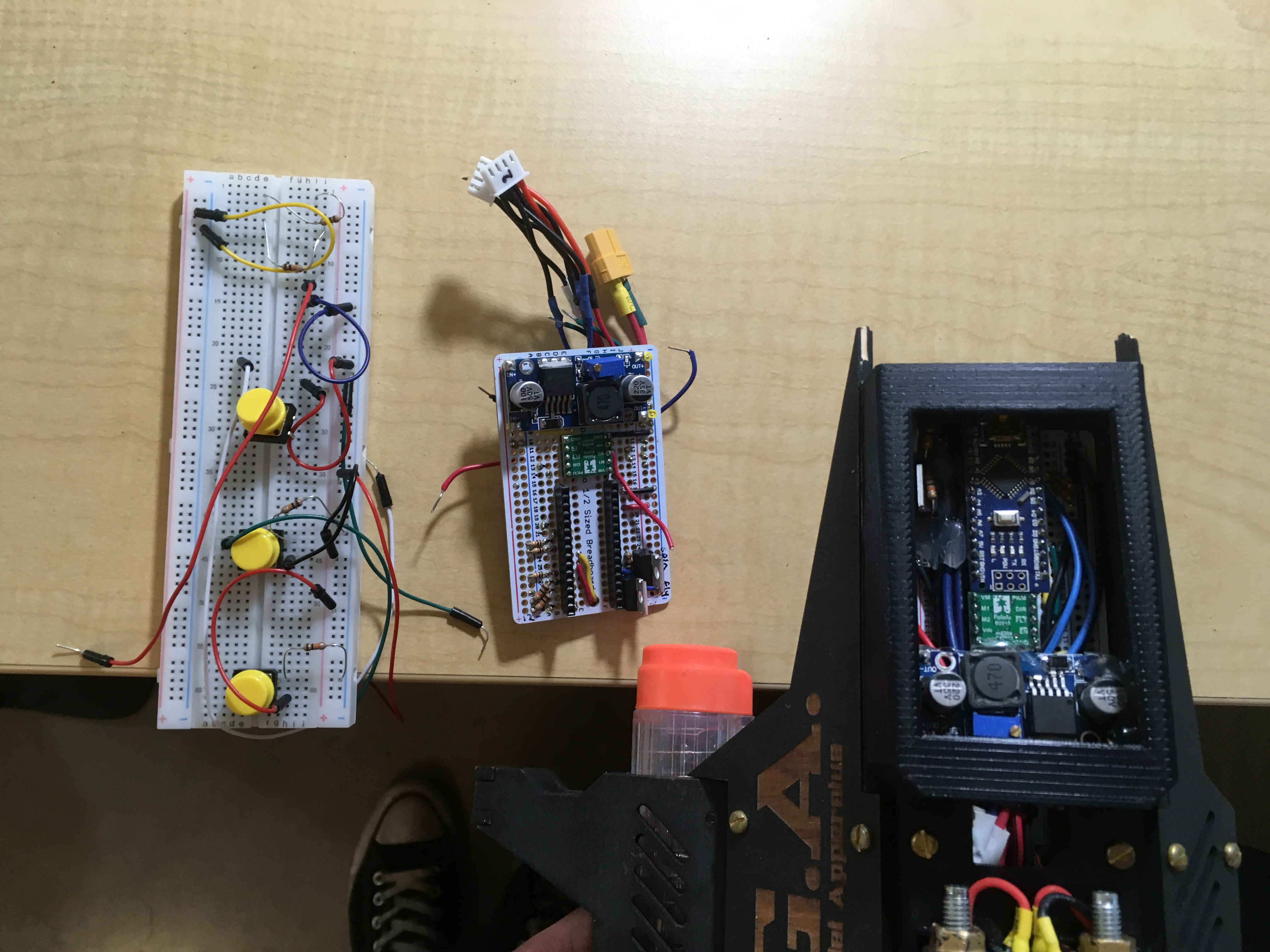
(55) Successive iterations of my electronic systems. From left to right are some test setup on a breadboard, a failed permaproto board, and the final one installed into the gauntlet.
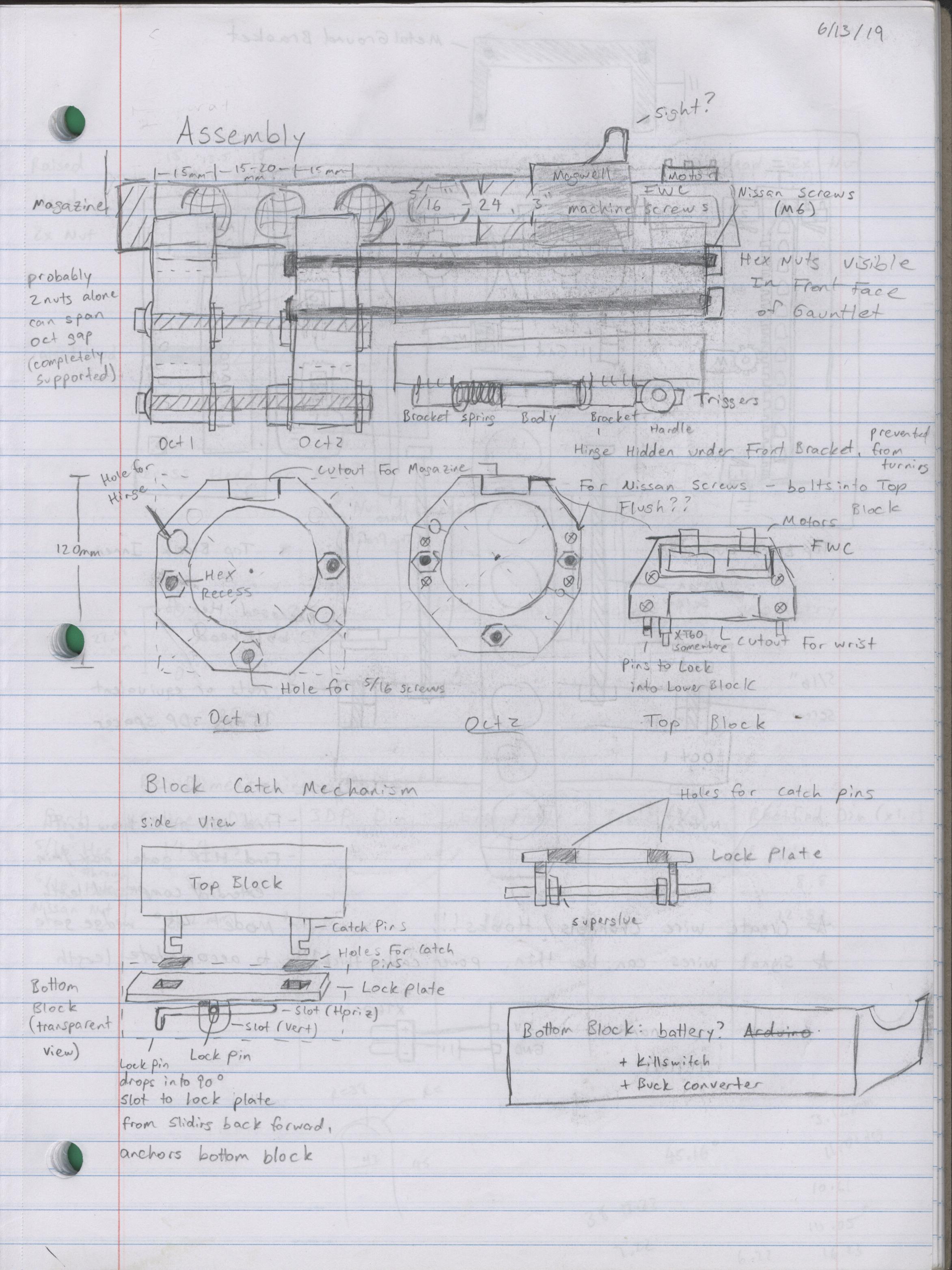
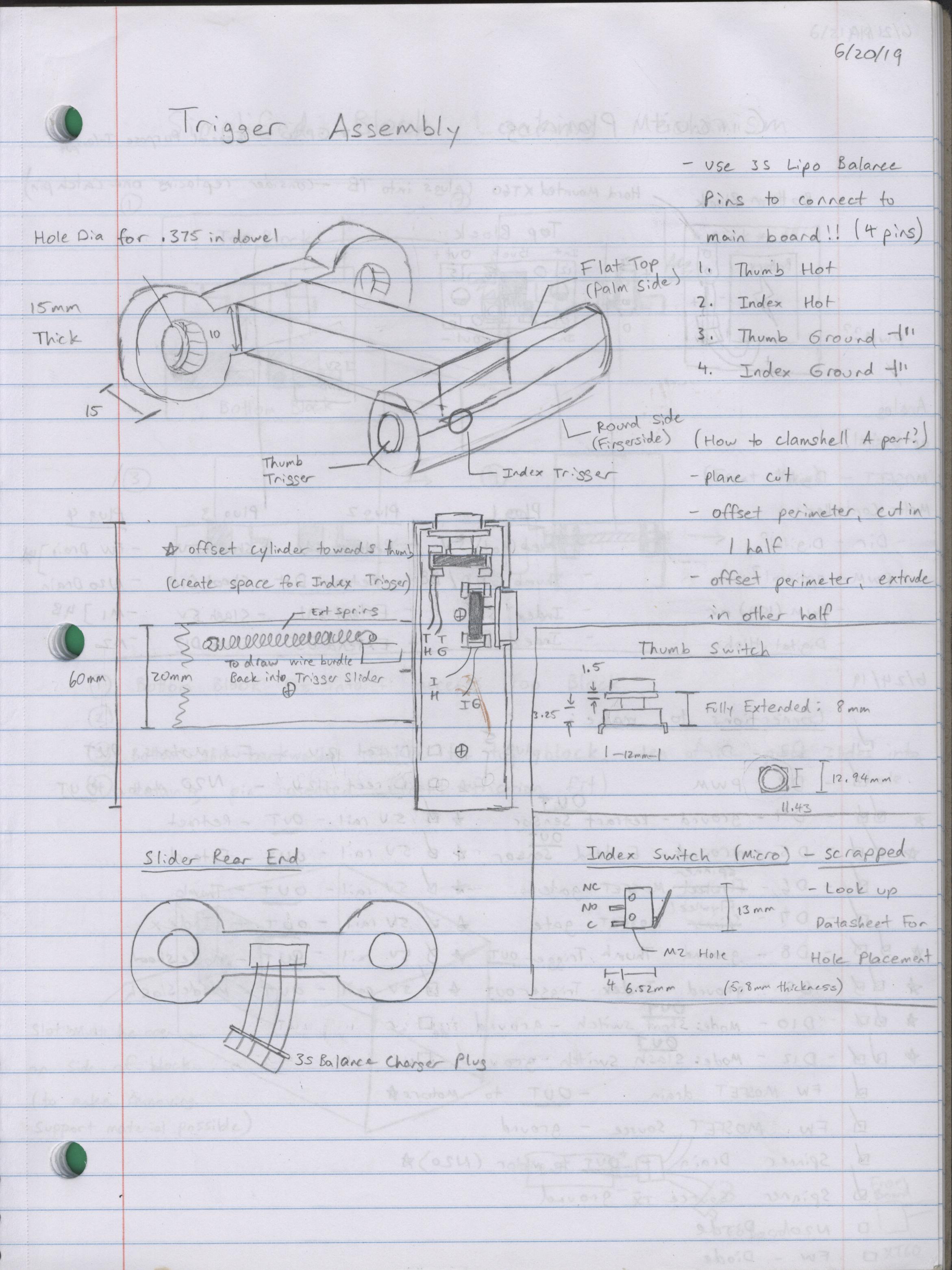
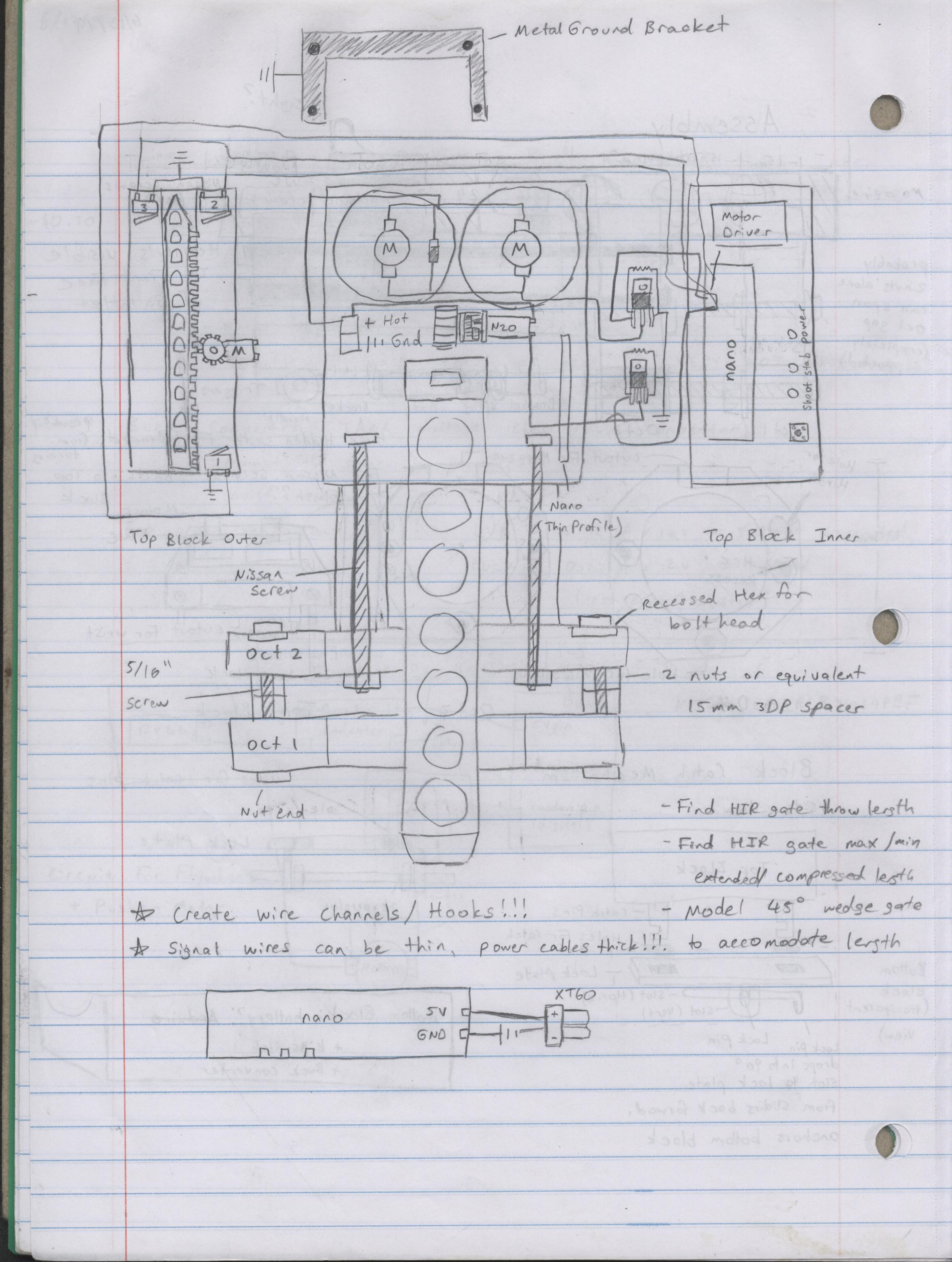
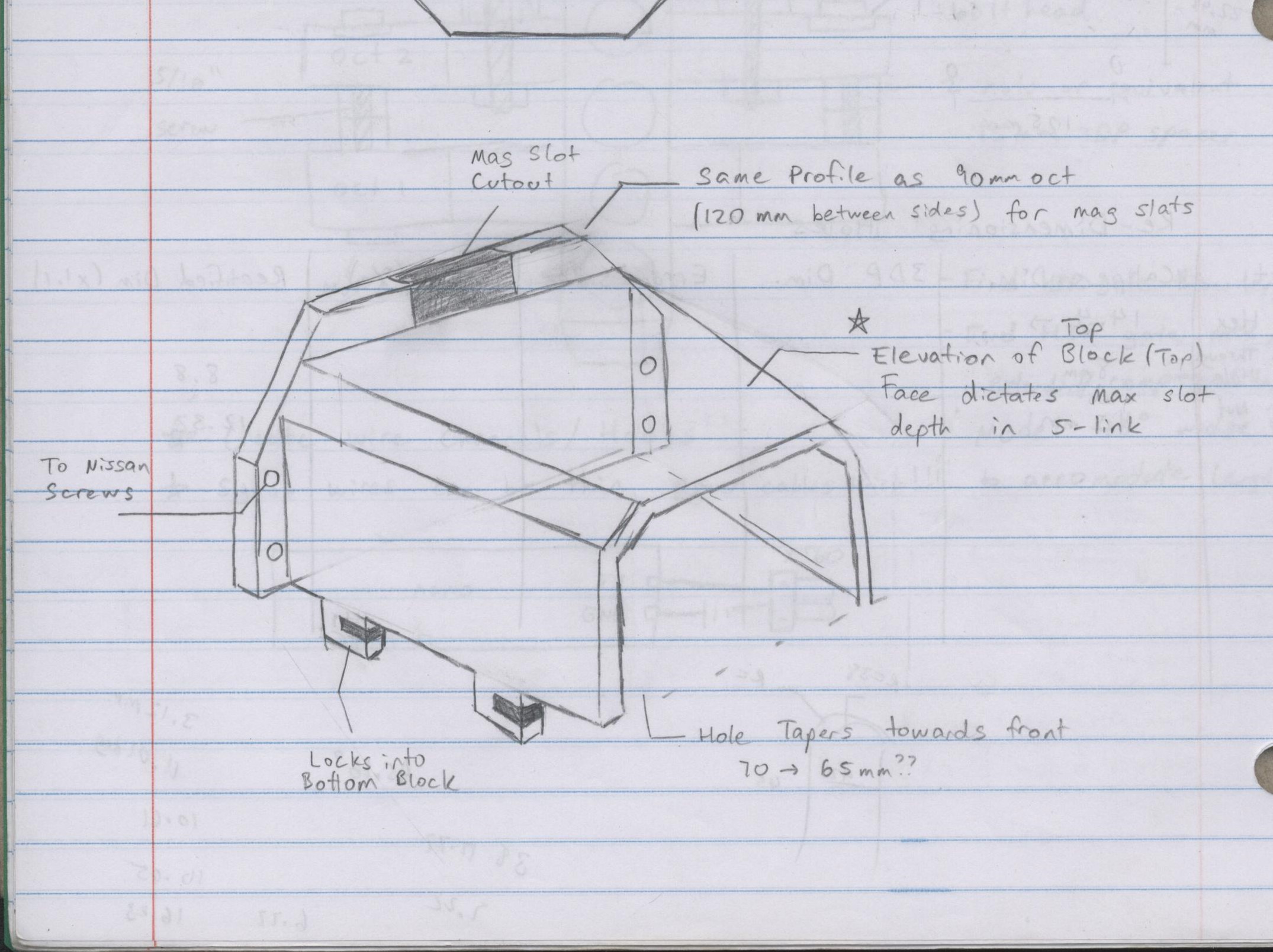
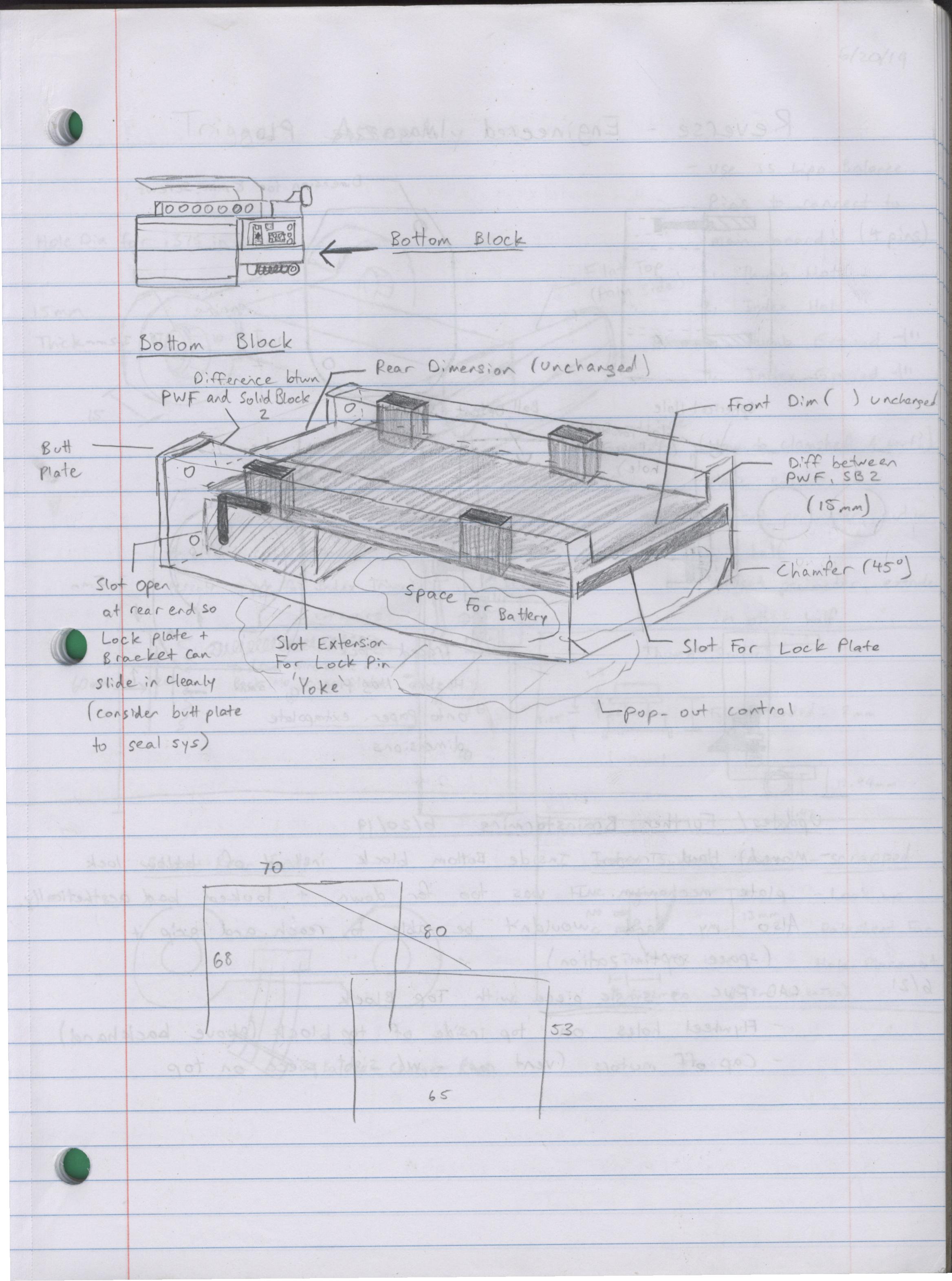
Finally, images 56 through 62 are my annotated sketches and diagrams I made when conceptualizing my design. I thought they were pretty neat and wanted to include them too.
ok thats all
